2tom212

5. MASZYNY ELEKTRYCZNE 426
Redukcja prędkości wirnika w stosunku do prędkości synchronicznej z jaką wiruje pole jest wyrażona wzorem
(5.188)
<“JP _ Zr
Q rss~tir Zr—Zs
przy czym Zr, Zs — liczba zębów wirnika i stojana.
Po założeniu, że Zr — Zs = ±2p oraz / = 50 1/s, prędkość kątowa, rad/s, i prędkość obrotowa, obr/min, będą odpowiednio zgodne z zależnościami
200rr
~zT’
6000
(5.189)
Jak widać, liczba biegunów silnika reduktorowego nie ma wpływu na prędkość silnika reduktorowego.
Współczynniki energetyczne ą i cosę> silników tego typu są bardzo małe ze względu na duży prąd magnesujący i wykorzystywanie dla wytworzenia momentu jedynie amplitudy modulacji pola głównego, nic zaś całego pola. Ich zaletą w niektórych zastosowaniach jest to, że prędkość wału wyjściowego przy zasilaniu z sieci o częstotliwości przemysłowej może być łatwo zredukowana bez konieczności stosowania przekładni mechanicznej.
Silniki histerezowe
Znalazły one szerokie zastosowanie w urządzeniach do zapisu i odtwarzania dźwięku i obrazu dzięki samoczynnemu rozruchowi, równomierności prędkości obrotowej oraz łagodnemu przejściu od pracy asynchronicznej do synchronicznej.
Silniki tego typu wykonuje się najczęściej jako jednofazowe z uzwojeniem pomocniczym kondensatorowym i z uzwojeniem pomocniczym zwartym (w zakresie najmniejszych mocy). W pierwszym przypadku stosuje się uzwojenia dwuwarstwowe skrócone rozłożone w żłobkach lub uzwojenia sinusoidalne, a w drugim — uzwojenia skupione oraz uzwojenia zwarte obejmujące części bieguna wydatnego stojana. Szczerbinki żłobkowe zamyka się klinami magnetycznymi, co ogranicza znacznie straty wywołane wyższymi harmonicznymi pola. Uzyskuje się w ten sposób wzrost momentu silnika do wartości bliskiej granicy teoretycznej.
Rozwiązania wirników silników histcrezowych można sprowadzić do trzech zasadniczych odmian:
— wirniki, w których cienka warstwa materiału histerezowego wykonana w formie cienkościennego litego lub blachowancgo cylindra lub długiej spirali (zwój obok zwoju) jest osadzona na pełnym, a rzadziej wydatnobiegunowym miękkim rdzeniu magnetycznym;
— wirniki o grubej warstwie czynnej osadzonej na rdzeniu niemagnetycznym;
— wirniki złożone z oddzielnych cienkich tarczek osadzonych na wale (silniki najmniejszych mocy z pomocniczym uzwojeniem zwartym).
W silnikach pierwszej odmiany występuje przemagnesowywanie promieniowe warstwy czynnej, a w silnikach odmiany drugiej i trzeciej — strumień przemagnesowujący warstwę ma kierunek obwodowy lub obwodowo-promieniowy. Większość materiałów histerezowych w zakresie małych indukcji: w szczelinie (0,2-r 0,4 T) ma straty wywołane histerezą (moment histcrczowy), większe przy przemagnesowywaniu obwodowym. W silnikach o indukcjach większych jest odwrotnie. Zjawisko to ma istotny wpływ na wybór rozwiązania wirnika.
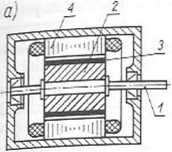
Na rysunku 5.156 pokazano przykłady rozwiązań konstrukcyjnych silników histerezowych z wirnikiem wewnętrznym i zewnętrznym oraz wykrój blachy wirnika i schemat budowy mikrosilnika histerezowego z uzwojeniem pomocniczym zwartym.
b) 4
|
NWiwWYWW |
3 | ||
|
p- |
> |
N s V n—i | |
|
r |
N | ||

Rys 5-156. Przykłady konstrukcji silników histerezowych: a) z wirnikiem wewnętrznym; b.ł z wirnikiem zewnętrznym; d) schemat budowy mikrosilnika z pomocniczym uzwojeniem zwartym oraz c) wykrój blachy wirnika mikrosilnika
jednofazowego
I - wał, 2 rdzeń wirnika, 3 — materiał histcrczowy, 4 — uzwojony pakiet stojana, 5 zwój zwarty, 6 cewka skupiona rdzenia stojana
Silniki z wirnikiem zewnętrznym znajdują przede wszystkim zastosowanie w napędach żyroskopów oraz w niektórych typach magnetofonów i magnetowidów stacyjnych, tam gdzie jest korzystny duży moment bezwładności części ruchomej. Mikrosilniki jednofazowe natomiast są stosowane do napędu przekaźników czasowych i programatorów i są wtedy wyposażone w precyzyjną przekładnię mechaniczną redukującą prędkość synchroniczną najczęściej do 1, 2, 10 i 60 obr/min.
Na rysunku 5.157 przedstawiono charakterystykę mechaniczną silnika histerezowego oraz charakterystykę momentu w funkcji prędkości i kąta obciążenia. Obrazują one zjawiska występujące w maszynie histcrczowcj podczas jej pracy asynchronicznej i synchronicznej. Tę ostatnią otrzymuje się rozcinając oś prędkości w punkcie Qr = (ojp, odpowiadającym prędkości synchronicznej i wstawiając w miejsce rozcięcia oś kątów obciążenia.
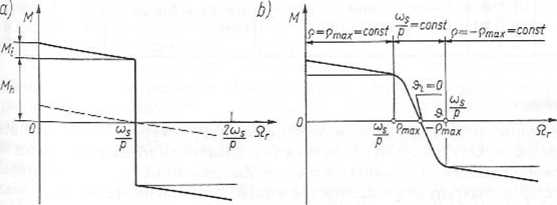
Rys. 5.157. Charakterystyka mechaniczna (a) i charakterystyka momentu w funkcji prędkości i kąta obciążenia silnika histerezowego (b)
Moment rozruchowy silnika histerezowego jest większy niż maksymalny moment synchroniczny, gdyż w zakresie pracy asynchronicznej pojawia się dodatkowo moment indukcyjny wywołany prądami wirowymi indukowanymi w wirniku. Prądy te są jednak stosunkowo małe, ponieważ rezystywność materiału histerezowego jest duża i krytyczny moment indukcyjny wypada przy sb» 1.
W tablicy 5.79 przedstawiono dane techniczne niektórych mikrosilników jedno-azowych do napędów programatorów i przekaźników czasowych produkowanych w Polsce.
Wyszukiwarka
Podobne podstrony:
2tom215 5. MASZYNY ELEKTRYCZNE 432 że w granicznym przypadku wirnik silnika skokowego może opóźnić s
2tom216 5. MASZYNY ELEKTRYCZNE 434 Silniki skokowe o magnesach trwałych charakteryzuje stosunkowo du
2tom210 5. MASZYNY ELEKTRYCZNE 422 (tzw. kąt histerezy) o jaki pierwsza harmoniczna strumienia opóźn
2tom211 5. MASZYNY ELEKTRYCZNE 424 M. = — /vR2y + XL2 VA~ ViR+UXdsin9L+ URcosSL)
2tom213 5. MASZYNY ELEKTRYCZNE 428 Tablica 5.79. Dane techniczne mikrosilników synchronicznych jedno
2tom214 5. MASZYNY ELEKTRYCZNE 430 5. MASZYNY ELEKTRYCZNE 430 Rys. 5.159. Sposób połączenia uzwojeni
2tom217 5. MASZYNY ELEKTRYCZNE 436 przyspieszonej, w którym co prawda silnik nadąża za powolnymi zmi
2tom218 5. MASZYNY ELEKTRYCZNE System powstawania maszyn elektrycznych reprezentuje etap konstruowan
2tom219 5. MASZYNY ELEKTRYCZNE 440 i---- Etap powstawania mo
2tom160 5. MASZYNY ELEKTRYCZNE 322 Przemysł krajowy produkuje następujące typy prądnic synchroniczny
Izł w - U maszynie o dużej szczelinie w stosunku do podziulki żłobkowej stojana lub wirnika przeważa
HPIM5166 wzrasta liczba stopni redukcji prędkości. W maszynach stacjonarnych najczęściej używanymi s
Pole stojana Pole wirnika ) Stóito V Uzwojenie stojanaIdea wirującej maszyny elektrycznej Wirnik
2tom207 5. MASZYNY ELEKTRYCZNE 416 nych materiałów strony wtórnej; wirnik jest umieszczony między uż
Zadanie 6. Która z wymienionych maszyn elektrycznych jest wykorzystywana jako czujnik prędkości
2tom123 5. MASZYNY ELEKTRYCZNE 248 — tarczowe o jednym stojanie i jednym wirniku -
2tom126 5. MASZYNY ELEKTRYCZNE 254 i wirnika. Wykres kołowy sporządza się na podstawie wyników próby
2tom132 5. MASZYNY ELEKTRYCZNE 266 gdzie: ap — liczba pierścieni ślizgowych w maszynie; vp — prędkoś
więcej podobnych podstron