2tom248
L = ■
l+o-r
fl +
Rr+Rd
(6.87)
(6.88)
oraz moment ze wzoru 3/r2 (Rd+Rr)
v<»„
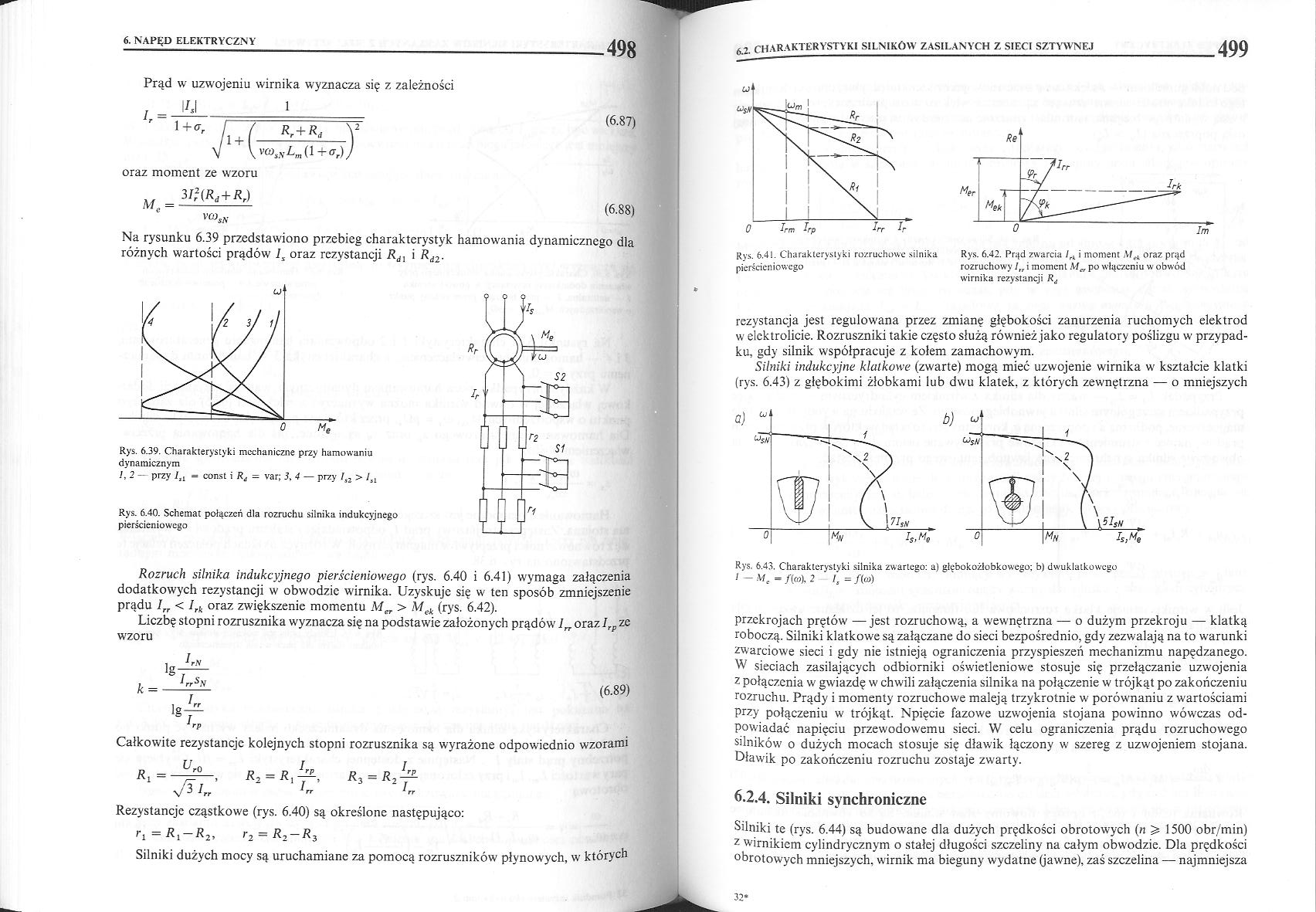
Na rysunku 6.39 przedstawiono przebieg charakterystyk hamowania dynamicznego dla różnych wartości prądów /s oraz rezystancji Rdl i Rd2.
Rys. 6.39. Charakterystyki mechaniczne przy hamowaniu dynamicznym
1,2 — przy Isl = const i Rd = var; 3,4 — przy Is2 > lsl
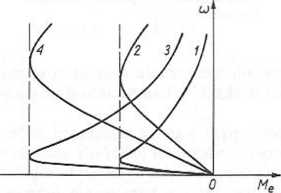
Rys. 6.40. Schemat połączeń dla rozruchu silnika indukcyjnego pierścieniowego
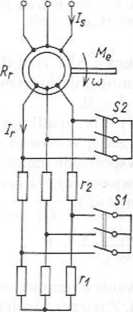
Rozruch silnika indukcyjnego pierścieniowego (rys. 6.40 i 6.41) wymaga załączenia dodatkowych rezystancji w obwodzie wirnika. Uzyskuje się w ten sposób zmniejszenie prądu /„ < Irk oraz zwiększenie momentu M„ > Mek (rys. 6.42).
Liczbę stopni rozrusznika wyznacza się na podstawie założonych prądów lrr oraz Irp ze wzoru
Ig-
rP
(6.89)
Całkowite rezystancje kolejnych stopni rozrusznika są wyrażone odpowiednio wzorami
R,=
R, = R,
V
3
R-, - R,
Rezystancje cząstkowe (rys. 6.40) są określone następująco:
ri — R\ ^2> rz~ R-2 R3
Silniki dużych mocy są uruchamiane za pomocą rozruszników płynowych, w których

CHARAKTERYSTYKI SILNIKÓW ZASILANYCH Z SIECI SZTYWNEJ
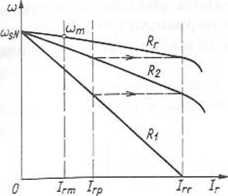

Rys. 6.41. Charakterystyki rozruchowe silnika Rys. 6.42. Prąd zwarcia /rt i moment A/H oraz prąd pierścieniowego rozruchowy I„ t moment Mcf po włączeniu w obwód
wirnika rez.ystancji Rd
rezystancja jest regulowana przez zmianę głębokości zanurzenia ruchomych elektrod w elektrolicie. Rozruszniki takie często służą również jako regulatory poślizgu w przypadku, gdy silnik współpracuje z kołem zamachowym.
Silniki indukcyjne klatkowe (zwarte) mogą mieć uzwojenie wirnika w kształcie klatki (rys. 6.43) z głębokimi żłobkami lub dwu klatek, z których zewnętrzna — o mniejszych
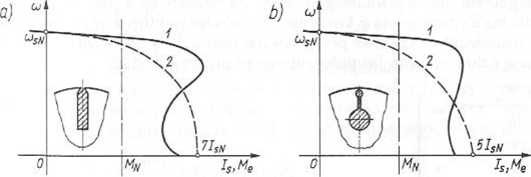
Rys. 6.43. Charakterystyki silnika zwarleao: a) glebokożlobkowego: b) dwuklatkowcgo ' - -V0 = /(<»), 2 '/,=/(<»)
przekrojach prętów —jest rozruchową, a wewnętrzna — o dużym przekroju — klatką roboczą. Silniki klatkowe są załączane do sieci bezpośrednio, gdy zezwalają na to warunki zwarciowe sieci i gdy nie istnieją ograniczenia przyspieszeń mechanizmu napędzanego. W sieciach zasilających odbiorniki oświetleniowe stosuje się przełączanie uzwojenia z połączenia w gwiazdę w chwili załączenia silnika na połączenie w trójkąt po zakończeniu rozruchu. Prądy i momenty rozruchowe maleją trzykrotnie w porównaniu z wartościami przy połączeniu w trójkąt. Npięcie fazowe uzwojenia stojana powinno wówczas odpowiadać napięciu przewodowemu sieci. W celu ograniczenia prądu rozruchowego silników' o dużych mocach stosuje się dławik łączony w szereg z uzwojeniem stojana. Dławik po zakończeniu rozruchu zostaje zwarty.
Silniki te (rys. 6.44) są budowane dla dużych prędkości obrotowych (n > 1500 obr/min) 7 warnikiem cylindrycznym o stałej długości szczeliny na całym obwodzie. Dla prędkości obrotowych mniejszych, wirnik ma bieguny wydatne (jawne), zaś szczelina — najmniejsza
32*
Wyszukiwarka
Podobne podstrony:
PRZEKROJE WYROBOW Z UZWOJENIAMI ELEKTRYCZNYMI (UPROSZCZENIA) b) tt) Uzwojenia wirników i stoją w
2tom242 6. NAPĘD ELEKTRYCZNY 486 6. NAPĘD ELEKTRYCZNY 486 Rys. 6.24. Charakterystyka silnika szerego
2tom240 6. NAPĘD ELEKTRYCZNY 482 Q0N < O, a drugi QB np. jeździe pojazdu po pochyłości, przy czym
2tom241 6. NAPĘD ELEKTRYCZNY 484 Rys. 6.22. Silnik szeregowy prądu stałego: a) schemat połączeń; b)
2tom243 6. NAPĘD ELEKTRYCZNY 488 Rys. 6.27. Hamowanie silnikiem szeregowym (schematy i charakterysty
2tom244 6. NAPĘD ELEKTRYCZNY 490 statyczna odpowiada stosunkowi 0sN:0b k 2. Przy biegu jałowym, gdy
2tom247 6. NAPĘD ELEKTRYCZNY 496 w granicach (0,25-0,5)/,,. * J* < Is < Ik * (8-=-10)/*. W sil
2tom249 6. NAPĘD ELEKTRYCZNY 500 pod nabiegunnikiem — zwiększa się znacznie w przestrzeni międzybieg
Linie pola magnetycznego wirującego, wytworzonego przez prąd w uzwojeniu stojana, zamykają się wzdłu
1 07 - 164 - Błąd wskazowy wyznacza się z zależnościl„ w V 2bn n— 100 r OKr.A I, lub 100 A, - o I
Obliczanie zbiorników cylindrycznych pionowych Grubość blach płaszcza wyznacza się w zależności od
więcej podobnych podstron