2tom247
6. NAPĘD ELEKTRYCZNY 496
w granicach
(0,25-0,5)/,,. * J* < Is < Ik * (8-=-10)/*.
W silnikach specjalnego wykonania, np. dźwigowych, prądy zwarcia Ik mogą być większe. W silnikach szybkoobrotowych dużych mocy natomiast prąd biegu jałowego jest mniejszy niż 0,25 IsS.
W katalogu są zwykle podawane następujące dane znamionowe:
P„ [k WJ. Usfl [V], IsN [A], COS <Pfi, Py — Mby/My
uro [V] = y/3 Er0 [V], I,N [A], nN [obr/min] = —
n
Wartość poślizgu krytycznego niezbędną do wyznaczenia charakterystyki wyznacza się z zależności
h = Sy(pN+ y/pl-1)
przy
Qsy~Q,
Q
Rezystancja jednej fazy uzwojenia wirnika
K
Pg sn 1—Sj- 31?y
Rezystancja sprowadzona do obwodu uzwojenia stojana (tak jak wszystkie wielkości w równaniach opisujących silnik) jest wyrażona wzorem
Włączenie rezystancji w obwód wirnika powoduje zwiększenie poślizgu (przy nie zmienionym momencie maksymalnym) wg zależności
R*+Rr ' R.
oraz s = s-
Zwykle są zadane współrzędne punktu, przez który ma przechodzić charakterystyka A/„, wx = pQx. Dodatkową rezystancję oblicza się dla Mex < 1,2 jako
(6.85)
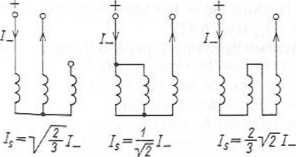
Charakterystyka mechaniczna silnika z włączoną rezystancją jest pokazana na rys. 6.36. Sprawność silnika maleje proporcjonalnie do zmniejszenia prędkości

Hamowanie silnikiem indukcyjnym może być realizowane następująco:
— z oddawaniem energii do sieci, gdy co > co*;
— przy zasilaniu uzwojenia stojana prądem stałym, gdy /s = 0;
— w układzie przeciwwłączcnia, gdy s > 1 (wirnik ma kierunek prędkości obrotowej przeciwny do kierunku pola wirującego).
Na rysunku 6.37 charakterystyki 1 i 2 odpowiadają hamowaniu generatorowemu, 3 i 4 — hamowaniu przeciwwłączeniem, a charakterystyka 5 — hamowaniu dynamicznemu przy fs = 0.
W każdym przypadku, poza hamowaniem dynamicznym, wartość rezystancji dodatkowej włączonej w obwód wirnika można wyznaczyć z zależności (6.85) dla zadanego punktu o współrzędnych Mex, tox = pQx, przez który ma przejść charakterystyka silnika. Dla hamowania generatorowego sx oraz sN są ujemne, zaś dla hamowania przeciwwłączeniem poślizg
msfl+a>x
sx --> 1
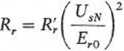
Hamowanie dynamiczne jest szczególnym przypadkiem prądowego zasilania uzwojenia stojana. Zastępczy trójfazowy prąd Is odpowiadający stałemu prądowi I _ wyznacza się z równoważności przepływów magnetycznych. W różnych układach połączeń relacje te przedstawiono na rys. 6.38.
Rys. 6.38. Układy połączeń uzwojeń stojana przy zasilaniu prądem stałym dla hamowania dynamicznego
Charakterystykę silnika dla hamowania dynamicznego należy wyznaczyć punkt po punkcie, zakładając na początku prąd zastępczy trójfazowy z którego wylicza się potrzebny prąd stały Następnie z dostępnej charakterystyki Lm = /(/J wybiera się pary wartości Lm,Im i przy założonej uprzednio wartości Rd oblicza się względną prędkość obrotową
M _ v _ R' + R* I
“5,V V co,„Lm{l+tJr) V . /
■* m I
S\
Rys. 6.36. Charakterystyki silnika indukcyjnego przy włączeniu dodatkowej rezystancji w obwód wirnika 1 - naturalna, 2 — przechodząca przez zadany punkt o współrzędnych M„, (ox = pQx
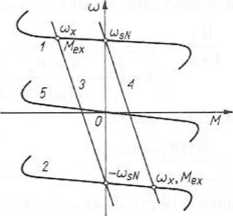
Rys. 6.37. Hamowanie silnikiem indukcyjnym 7.2—generatorowe: 3,4 - - przeciwwłączeniem; 5 — dynamiczne
H

32 Poradnik inżyniera elektryka tom 2
Wyszukiwarka
Podobne podstrony:
2tom242 6. NAPĘD ELEKTRYCZNY 486 6. NAPĘD ELEKTRYCZNY 486 Rys. 6.24. Charakterystyka silnika szerego
2tom240 6. NAPĘD ELEKTRYCZNY 482 Q0N < O, a drugi QB np. jeździe pojazdu po pochyłości, przy czym
2tom241 6. NAPĘD ELEKTRYCZNY 484 Rys. 6.22. Silnik szeregowy prądu stałego: a) schemat połączeń; b)
2tom243 6. NAPĘD ELEKTRYCZNY 488 Rys. 6.27. Hamowanie silnikiem szeregowym (schematy i charakterysty
2tom244 6. NAPĘD ELEKTRYCZNY 490 statyczna odpowiada stosunkowi 0sN:0b k 2. Przy biegu jałowym, gdy
2tom245 6. NAPĘD ELEKTRYCZNY 492 w których wprowadzono operatory obrotu 6. NAPĘD ELEKTRYCZNY 4921 V3
2tom246 6. NAPĘD ELEKTRYCZNY 494 Rys. 6.33. Oscylacyjny przebieg prędkości kątowej a — przy odciążen
2tom248 6. NAPĘD ELEKTRYCZNY 498 Prąd w uzwojeniu wirnika wyznacza się z zależnościl/J &
2tom249 6. NAPĘD ELEKTRYCZNY 500 pod nabiegunnikiem — zwiększa się znacznie w przestrzeni międzybieg
Napęd elektryczny jako dziedzina systemowa należy do grupy przedmiotów_specjalizacyjnych_ Technika
2tom259 6. NAPĘD ELEKTRYCZNY6.5. Metody oraz układy regulacji i stabilizacji prędkości silników prąd
2tom235 6. NAPĘD ELEKTRYCZNY 472 a) c 25 Bu / V b) s 2u »e mĄ/ i A ■
NPZG# NIDERLANDZKI PRACA ZA GRANICĄ Zbierałem owoce. - Ik heb fruit geplukt. Jestem ogrodnikiem. - I
ScanImage06 Napęd elektryczny Napęd elektryczny, jest to napędzanie maszyny roboczej, np. pompy za p
więcej podobnych podstron