2tom259
6. NAPĘD ELEKTRYCZNY
6.5. Metody oraz układy regulacji i stabilizacji prędkości silników prądu przemiennego
6.5.1. W prowadzenie
Ekonomiczna regulacja prędkości obrotowej silników elektrycznych prądu przemiennego jest możliwa albo przez zmianę częstotliwości i amplitudy napięcia lub prądu zasilającego uzwojenie stojana, albo przez odprowadzenie elektrycznej mocy z obwodu wirnika silnika indukcyjnego pierścieniowego. Skokowa zmiana prędkości jest możliwa również przez zmianę liczby par biegunów.
Opisane w podrozdziale 6.2 kształtowanie charakterystyk silnika indukcyjnego przez włączanie w obwód wirnika dodatkowych rezystancji, związane ze stratami mocy proporcjonalnymi do zmniejszenia prędkości, jest stosowane tylko dla krótkotrwałych okresów pracy oraz dla rozruchu i hamowania napędu. Przy niewielkich mocach znamionowych jest niekiedy stosowana modulacja rezystancji w obwodzie wirnika, umożliwiająca utrzymanie sztywnej charakterystyki mechanicznej pQ = « = f(Me). Jeśli tyrystorowy łącznik zwiera część rezystancji dodatkowej tak, że zmienia się ona w granicach od zera do Rd2, to wypadkowa rezystancji jest określona wzorem
(6.120)
R,i — Ra 1 + R"
w którym: ia — czas włączenia sekcji Rd2, f. — czas zwarcia sekcji Rdl.
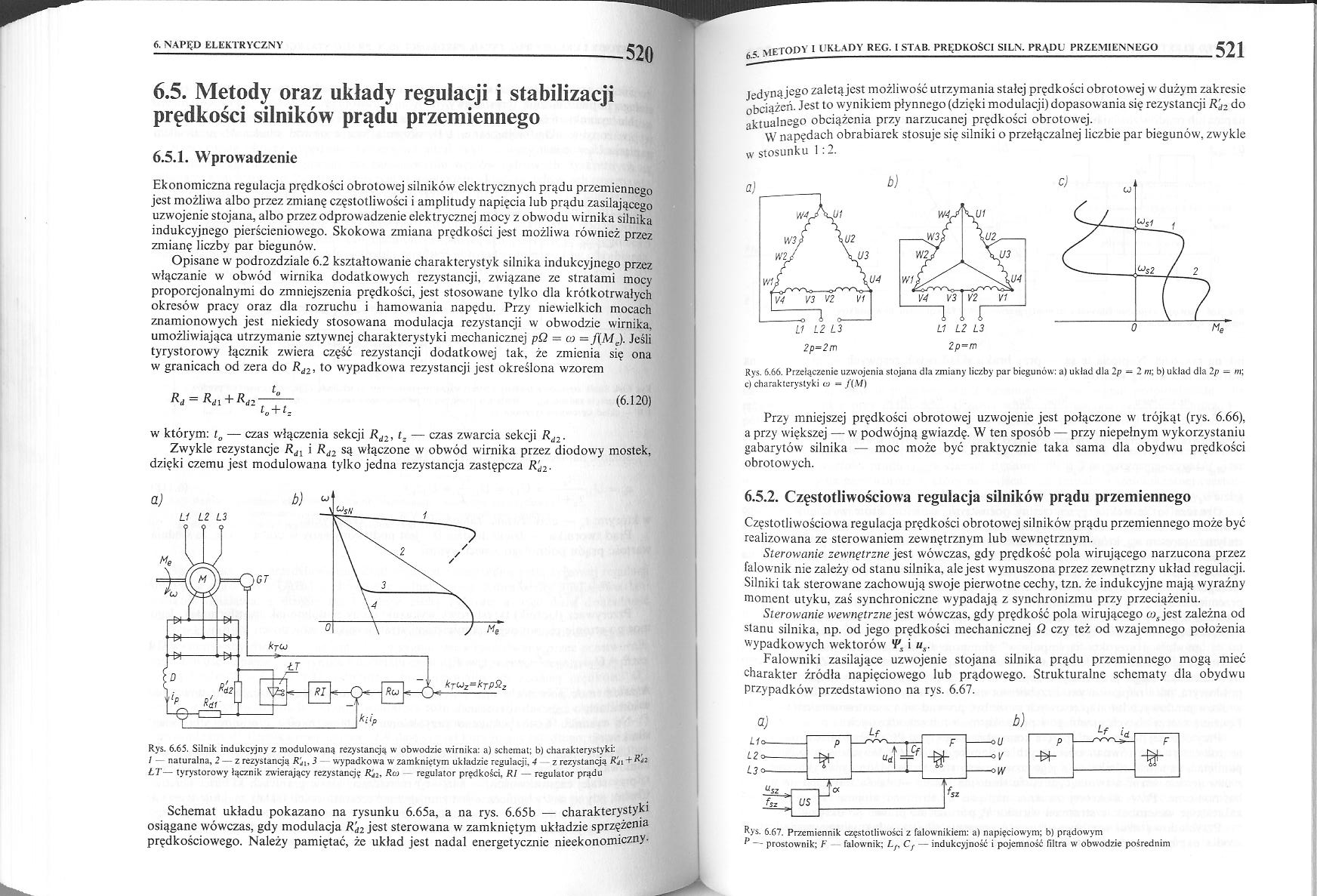
Zwykle rezystancje RdI i Rd2 są włączone w obwód wirnika przez diodowy mostek, dzięki czemu jest modulowana tylko jedna rezystancja zastępcza Rd2.
Rys. 6.65. Silnik indukcyjny z modulowaną rezystancją w obwodzie wirnika: a) schemat; b) charakterystyki:
I - naturalna, 2 — z rezystancja Rai, 3 wypadkowa w zamkniętym układzie regulacji, 4 z rezystancją Rji + R*2 ŁT— tyrystorowy łącznik zwierający rezystancję Rd2, Ret regulator prędkości. Rl — regulator prądu
Schemat układu pokazano na rysunku 6.65a, a na rys. 6.65b — charakterystyki osiągane wówczas, gdy modulacja jest sterowana w zamkniętym układzie sprzężenia predkościowego. Należy pamiętać, że układ jest nadal energetycznie nieekonomiczny-j-dyną jego zaletą jest możliwość utrzymania stałej prędkości obrotowej w dużym zakresie obciążeń. Jest to wynikiem płynnego (dzięki modulacji) dopasowania się rezystancji R'dl do aktualnego obciążenia przy narzucanej prędkości obrotowej.
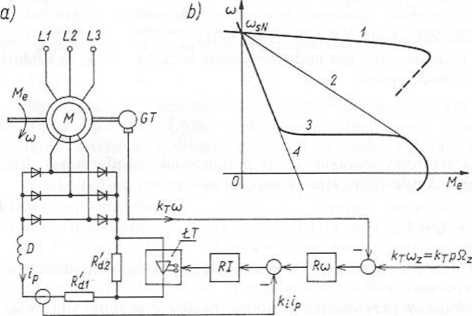
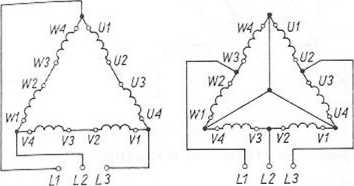
W napędach obrabiarek stosuje się silniki o przełączalnej liczbie par biegunów, zwykle w stosunku 1:2.
m 2p-m
Rys. 6.66. Przełączenie uzwojenia stojana dla zmiany liczby par biegunów: a) układ dla 2p = 2 m; b) układ dla 2p — w; c) charakterystyki o = /(Al)
Przy mniejszej prędkości obrotowej uzwojenie jest połączone w trójkąt (rys. 6.66), a przy większej — w podwójną gwiazdę. W ten sposób — przy niepełnym wykorzystaniu gabarytów silnika — moc może być praktycznie taka sama dla obydwu prędkości obrotowych.
6.5.2. Częstotliwościowa regulacja silników prądu przemiennego
Częstotliwościowa regulacja prędkości obrotowej silników prądu przemiennego może być realizowana ze sterowaniem zewnętrznym lub wewnętrznym.
Sterowanie zewnętrzne jest wówczas, gdy prędkość pola wirującego narzucona przez falownik nie zależy od stanu silnika, ale jest wymuszona przez zewnętrzny układ regulacji. Silniki tak sterowane zachowują swoje pierwotne cechy, tzn. że indukcyjne mają wyraźny moment utyku, zaś synchroniczne wypadają z synchronizmu przy przeciążeniu.
Sterowanie wewnętrzne jest wówczas, gdy prędkość pola wirującego jest zależna od stanu silnika, np. od jego prędkości mechanicznej Q czy też od wzajemnego położenia wypadkowych wektorów Vs i a,.
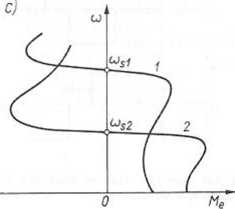
Falowniki zasilające uzwojenie stojana silnika prądu przemiennego mogą mieć charakter źródła napięciowego lub prądowego. Strukturalne schematy dla obydwu Przypadków przedstawiono na rys. 6.67.
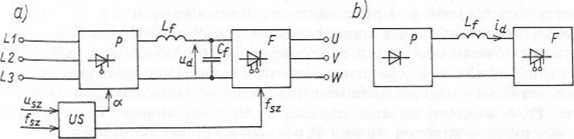
Rys. 6.67. Przemiennik częstotliwości 2 falownikiem: a) napięciowym; b) prądowym R — prostownik; F falownik; Lf, Cj — indukcyjność i pojemność filtra w obwodzie pośrednim
Wyszukiwarka
Podobne podstrony:
2tom252 6. NAPĘD ELEKTRYCZNY -5066.4. Metody oraz układy regulacji i stabilizacji prędkości silników
2tom257 6. NAPĘD ELEKTRYCZNY516 dzie sterowania US albo za pomocą regulacji prądu wyrównawczego, alb
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
2tom237 6. NAPĘD ELEKTRYCZNY 476 oraz z uwzględnieniem funkcji wartości początkowych O •
2tom250 6. NAPĘD ELEKTRYCZNY 502 ok. 10 razy większą niż jego rezystancja własna. W ten sposób uzwoj
2tom251 6. .NAPĘD ELEKTRYCZNY 504 Rys. 6.45. Praca ciągła silnika przy zmiennym obciążeniu 1 — przeb
2tom253 6. NAPĘD ELEKTRYCZNY 508 Jeśli napięcie wzbudzenia generatora oznaczyć ufG = kull;GS, gdzie
2tom254 6. NAPĘD ELEKTRYCZNY 510 napięcie na twomiku osiągnie ok. 95% wartości znamionowej. Od tej c
2tom255 6. NAPĘD ELEKTRYCZNY 512 silnik indukcyjny dla mocy mniejszych i średnich, zaś dla mocy duży
2tom258 6. NAPĘD ELEKTRYCZNY 518 między impulsami zadającymi i odtwarzającymi regulowaną wielkość, n
2tom246 6. NAPĘD ELEKTRYCZNY 494 Rys. 6.33. Oscylacyjny przebieg prędkości kątowej a — przy odciążen
2tom247 6. NAPĘD ELEKTRYCZNY 496 w granicach (0,25-0,5)/,,. * J* < Is < Ik * (8-=-10)/*. W sil
5.5 Układy wykonawcze 5.5.1 Mostek H - sterowanie silnikiem prądu stałego Mostek H (ang. H-Bridge) t
Układy regulacjiUkład smarowania Elementy elektrohydrauliczne wytwarzają ciśnienie oleju i sterują
Testowano kilka konfiguracji regulatorów, rozpoczęto od P
78608 Zdjęcie053 (6) Elektrohydrauliczne układy regulacji automatycznej, zwane układami zamkniętymi,
więcej podobnych podstron