2tom252
6. NAPĘD ELEKTRYCZNY -506
6.4. Metody oraz układy regulacji i stabilizacji prędkości silników prądu stałego
6.4.1. Układ generator-silnik
Racjonalna i ekonomiczna zarówno regulacja, jak i stabilizacja prędkości obrotowej silników prądu stałego możliwa jest tylko przez odpowiednią zmianę napięcia twornika lub napięcia wzbudzenia.
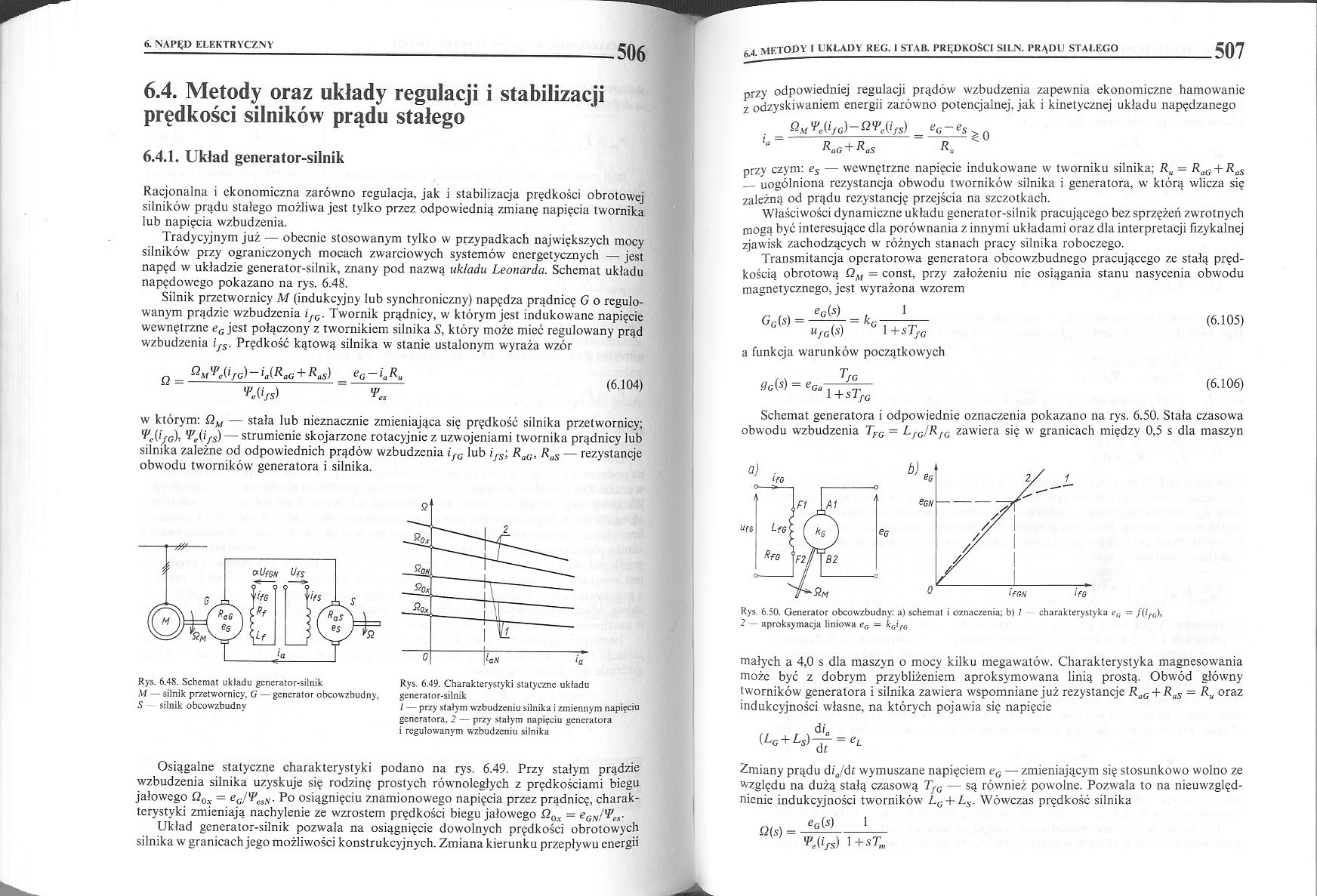
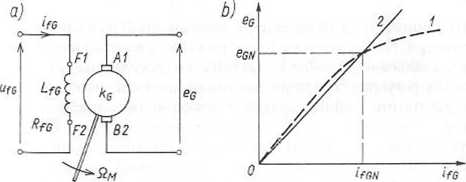
Tradycyjnym już — obecnie stosowanym tylko w przypadkach największych mocy silników przy ograniczonych mocach zwarciowych systemów energetycznych — jest napęd w układzie generator-silnik, znany pod nazwą układu Leonarda. Schemat układu napędowego pokazano na rys. 6.48.
Silnik przetwornicy M (indukcyjny lub synchroniczny) napędza prądnicę G o regulowanym prądzie wzbudzenia i/c. Twornik prądnicy, w którym jest indukowane napięcie wewnętrzne eG jest połączony z twornikiem silnika S. który może mieć regulowany prąd wzbudzenia ifs. Prędkość kątową silnika w stanie ustalonym wyraża wzór
£2 _ ^.U^cO/g) ~ ig(RgG + ^<is) _ eG~1a^u ,,
w
w którym: QM — stała lub nieznacznie zmieniająca się prędkość silnika przetwornicy; <ye(ifc), Ye(i/s) — strumienie skojarzone rotacyjnie z uzwojeniami twornika prądnicy lub silnika zależne od odpowiednich prądów wzbudzenia ifG lub ifs; RaC, RaS — rezystancje obwodu tworników generatora i silnika.
Rys. 6.48. Schemat układu generator-silnik M — silnik przetwornicy. G — generator obcowzbudny, 5 silnik obcowzbudny
£
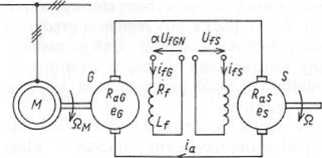
Rys. 6.49. Charakterystyki statyczne układu generator-silnik
/ — przy stałym wzbudzeniu silnika i zmiennym napięciu generatora. 2 — przy stałym napięciu generatora i regulowanym wzbudzeniu silnika
Osiągalne statyczne charakterystyki podano na rys. 6.49. Przy stałym prądzie wzbudzenia silnika uzyskuje się rodzinę prostych równoległych z prędkościami biegu jałowego Q0x = e0./'PMf,.. Po osiągnięciu znamionowego napięcia przez prądnicę, charakterystyki zmieniają nachylenie ze wzrostem prędkości biegu jałowego Qax = eGfj/'ł'i.s.
Układ generator-silnik pozwala na osiągnięcie dowolnych prędkości obrotowych silnika w granicach jego możliwości konstrukcyjnych. Zmiana kierunku przepływu energii przy odpowiedniej regulacji prądów wzbudzenia zapewnia ekonomiczne hamowanie z odzyskiwaniem energii zarówno potencjalnej, jak i kinetycznej układu napędzanego
_ ~ ®_ eG~eS > Q
la~ «.,;•! Ks R.
przy czym: es — wewnętrzne napięcie indukowane w tworniku silnika: Ru = RaG + Ręs
_uogólniona rezystancja obwodu tworników silnika i generatora, w którą wlicza się
zależną od prądu rezystancję przejścia na szczotkach.
Właściwości dynamiczne układu generator-silnik pracującego bez sprzężeń zwrotnych mogą być interesujące dla porównania z innymi układami oraz dla interpretacji fizykalnej zjawisk zachodzących w różnych stanach pracy silnika roboczego.
Transmitancja operatorowa generatora obcowzbudncgo pracującego ze stałą prędkością obrotową Qm = const, przy założeniu nic osiągania stanu nasycenia obwodu magnetycznego, jest wyrażona wzorem
= kG-
1
«/c(s) 1+s7}g
a funkcja warunków początkowych
(6.105)
Oc(s) = eo, (6-106)
1 +sTfo
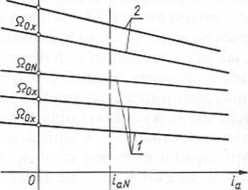
Schemat generatora i odpowiednie oznaczenia pokazano na rys. 6.50. Stała czasowa obwodu wzbudzenia Tro = l.fG'RfG zawiera się w granicach między 0,5 s dla maszyn
Rys. 6.50. Generator obcowzbudny: al schemat i oznaczenia; b) / charakterystyka eG = /(t/c), 2 - aproksymacja liniowa eG = kGi/G
małych a 4,0 s dla maszyn o mocy kilku megawatów. Charakterystyka magnesowania może być z dobrym przybliżeniem aproksymowana linią prostą. Obwód główny tworników generatora i silnika zawiera wspomniane już rezystancje RaC + RaS = Ru oraz indukcyjności własne, na których pojawia się napięcie
d/„
(Lg + Ls)—— - eL
Zmiany prądu dia/dr wymuszane napięciem eG — zmieniającym się stosunkowo wolno ze względu na dużą stalą czasową 7}c — są również powolne. Pozwala to na nieuwzględnienie indukcyjności tworników Lr; + Ls. Wówczas prędkość silnika 1
«(*) =
+*Tm
Wyszukiwarka
Podobne podstrony:
2tom259 6. NAPĘD ELEKTRYCZNY6.5. Metody oraz układy regulacji i stabilizacji prędkości silników prąd
2tom257 6. NAPĘD ELEKTRYCZNY516 dzie sterowania US albo za pomocą regulacji prądu wyrównawczego, alb
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
2tom250 6. NAPĘD ELEKTRYCZNY 502 ok. 10 razy większą niż jego rezystancja własna. W ten sposób uzwoj
2tom251 6. .NAPĘD ELEKTRYCZNY 504 Rys. 6.45. Praca ciągła silnika przy zmiennym obciążeniu 1 — przeb
2tom253 6. NAPĘD ELEKTRYCZNY 508 Jeśli napięcie wzbudzenia generatora oznaczyć ufG = kull;GS, gdzie
2tom254 6. NAPĘD ELEKTRYCZNY 510 napięcie na twomiku osiągnie ok. 95% wartości znamionowej. Od tej c
2tom255 6. NAPĘD ELEKTRYCZNY 512 silnik indukcyjny dla mocy mniejszych i średnich, zaś dla mocy duży
2tom258 6. NAPĘD ELEKTRYCZNY 518 między impulsami zadającymi i odtwarzającymi regulowaną wielkość, n
5.5 Układy wykonawcze 5.5.1 Mostek H - sterowanie silnikiem prądu stałego Mostek H (ang. H-Bridge) t
Układy regulacjiUkład smarowania Elementy elektrohydrauliczne wytwarzają ciśnienie oleju i sterują
78608 Zdjęcie053 (6) Elektrohydrauliczne układy regulacji automatycznej, zwane układami zamkniętymi,
energii elektrycznej w układach i systemach elektrycznych; topologie, metody analizy, modelowanie or
automatyki. Kryteria jakości regulacji. Metody doboru nastaw regulatorów. Układy sterowania otwarte,
001 (4) Układy regulacji i sterowania kl.4T 1 Lekcja 10 Temat: Elementy pneumatycznego układu sterow
410 3 10. AUTOMATYZACJA W ELEKTROWNIACH PAROWYCH Rys. 10.5. Układy automatycznej regulacji podstawow
więcej podobnych podstron