2tom258
6. NAPĘD ELEKTRYCZNY 518
między impulsami zadającymi i odtwarzającymi regulowaną wielkość, nosi nazwę fazoanalogowego. Wielkość regulowana może być zadawana jako liczba w postaci cyfrowej odpowiednio zakodowanej i porównywana z podobną, cyfrowo zakodowaną wielkością odtworzoną. Wówczas układ regulacyjny jest układem cyfrowym.
Rzeczywiste układy napędowe zawierające silnik wykonawczy, który jest z natury elementem ciągłym analogowym, po zastosowaniu węzłów cyfrowych dyskretnych są układami hybrydowymi. Za coraz szerszym stosowaniem układów cyfrowych przemawia względna łatwość osiągania dużej dokładności. Poza tym układy cyfrowe cechuje wysoka stabilność sygnału zadawanego w czasie, możliwość podawania sygnału sterującego wprost z komputera i wreszcie coraz bardziej konkurencyjnie niskie ceny podzespołów cyfrowych wykonywanych w technologii scalonej z rosnącą skalą integracji. Szczególnego znaczenia nabierają układy z cyfrową pętlą regulacji położenia do napędów obrabiarek, maszyn wyciągowych, teleskopów itp.
Sto
Df
±LR
|
S2k |
*7-2 |
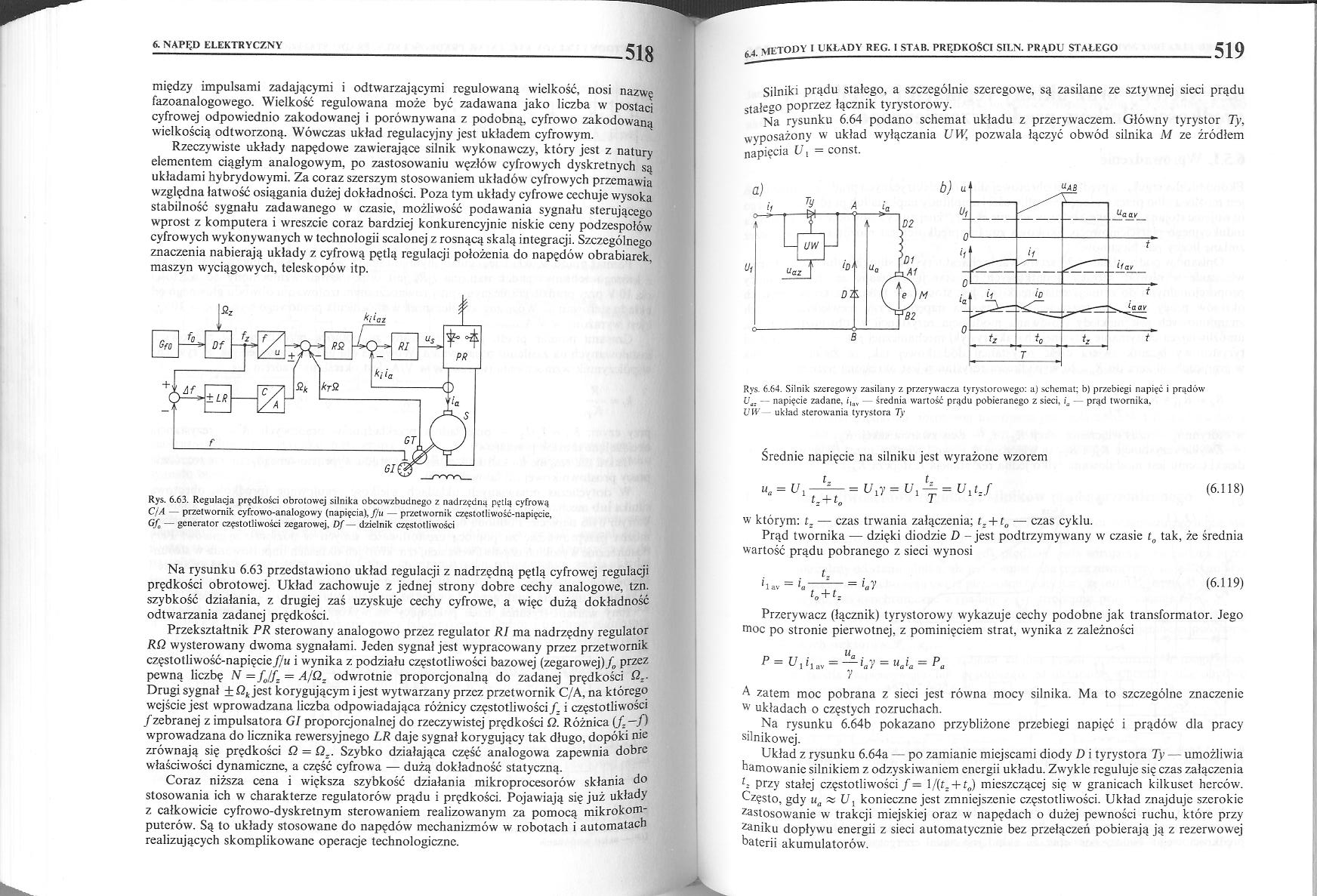
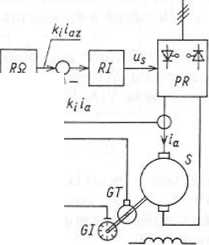
Rys. 6.63. Regulacja prędkości obrotowej silnika obcowzbudnego z nadrzędną pętlą cyfrową CjA — przetwornik cyfrowo-analogowy (napięcia),//u — przetwornik częstotliwość-napięcie, Gf0 — generator częstotliwości zegarowej. Df — dzielnik częstotliwości
Na rysunku 6.63 przedstawiono układ regulacji z nadrzędną pętlą cyfrowej regulacji prędkości obrotowej. Układ zachowuje z jednej strony dobre cechy analogowe, tzn. szybkość działania, z drugiej zaś uzyskuje cechy cyfrowe, a więc dużą dokładność odtwarzania zadanej prędkości.
Przekształtnik PR sterowany analogowo przez regulator RI ma nadrzędny regulator RQ wysterowany dwoma sygnałami. Jeden sygnał jest wypracowany przez przetwornik częstotliwość-napięcie fju i wynika z podziału częstotliwości bazowej (zegarowej)/„ przez pewną liczbę N = fjfz = A/Q, odwrotnie proporcjonalną do zadanej prędkości Q:-Drugi sygnał ±Qk jest korygującym i jest wytwarzany przez przetwornik C/A, na którego wejście jest wprowadzana liczba odpowiadająca różnicy częstotliwości /. i częstotliwości /zebranej z impulsatora GI proporcjonalnej do rzeczywistej prędkości Q. Różnica (f. —f) wprowadzana do licznika rewersyjnego LR daje sygnał korygujący tak długo, dopóki nie zrównają się prędkości Q = Qz. Szybko działająca część analogowa zapewnia dobre właściwości dynamiczne, a część cyfrowa — dużą dokładność statyczną.
Coraz niższa cena i większa szybkość działania mikroprocesorów skłania do stosowania ich w charakterze regulatorów prądu i prędkości. Pojawiają się już układy z całkowicie cyfrowo-dyskretnym sterowaniem realizowanym za pomocą mikrokomputerów. Są to układy stosowane do napędów mechanizmów w robotach i automatach realizujących skomplikowane operacje technologiczne.
519
64 METODY I OKŁADY REG. I STAB. PRĘDKOŚCI SILN. PRĄDU STAŁEGO
Silniki prądu stałego, a szczególnie szeregowe, są zasilane ze sztywnej sieci prądu stałego poprzez łącznik tyrystorowy.
js|a rysunku 6.64 podano schemat układu z przerywaczem. Główny tyrystor Ty, wyposażony w układ wyłączania UW, pozwala łączyć obwód silnika M ze źródłem napięcia U i = const.
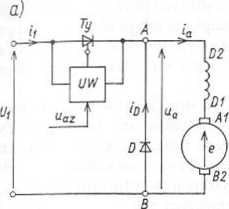
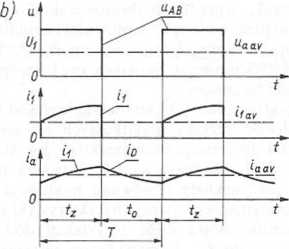
Rys. 6.64. Silnik szeregowy zasilany z przerywacza tyrystorowego: a) schemat; b) przebiegi napięć i prądów Ua. — napięcie zadane, i,av — średnia wartość prądu pobieranego z sieci. ia — prąd twornika.
UW układ sterowania tyrystora Ty
Średnie napięcie na silniku jest wyrażone wzorem
u*=U1-!?-=U1y=uĄ=U1tJ (6.118)
w którym: t, — czas trwania załączenia: t. + f„ — czas cyklu.
Prąd twornika — dzięki diodzie D - jest podtrzymywany w czasie t0 tak, że średnia wartość prądu pobranego z sieci wynosi
'lav = = 'a'! (6‘119)
Przerywacz (łącznik) tyrystorowy wykazuje cechy podobne jak transformator. Jego moc po stronie pierwotnej, z pominięciem strat, wynika z zależności
p = V\h™ = —i,y = »Ja = Pa
y
A zatem moc pobrana z sieci jest równa mocy silnika. Ma to szczególne znaczenie w układach o częstych rozruchach.
Na rysunku 6.64b pokazano przybliżone przebiegi napięć i prądów dla pracy silnikowej.
Układ z rysunku 6.64a po zamianie miejscami diody 0 i tyrystora Ty — umożliwia hamowanie silnikiem z odzyskiwaniem energii układu. Zwykle reguluje się czas załączenia przy stałej częstotliwości/ = 1 /(t, + tj mieszczącej się w granicach kilkuset herców. Często, gdy u„ « U, konieczne jest zmniejszenie częstotliwości. Układ znajduje szerokie zastosowanie w trakcji miejskiej oraz w napędach o dużej pewności ruchu, które przy zaniku dopływu energii z sieci automatycznie bez przełączeń pobierają ją z rezerwowej baterii akumulatorów.
Wyszukiwarka
Podobne podstrony:
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
2tom250 6. NAPĘD ELEKTRYCZNY 502 ok. 10 razy większą niż jego rezystancja własna. W ten sposób uzwoj
2tom251 6. .NAPĘD ELEKTRYCZNY 504 Rys. 6.45. Praca ciągła silnika przy zmiennym obciążeniu 1 — przeb
2tom252 6. NAPĘD ELEKTRYCZNY -5066.4. Metody oraz układy regulacji i stabilizacji prędkości silników
2tom253 6. NAPĘD ELEKTRYCZNY 508 Jeśli napięcie wzbudzenia generatora oznaczyć ufG = kull;GS, gdzie
2tom254 6. NAPĘD ELEKTRYCZNY 510 napięcie na twomiku osiągnie ok. 95% wartości znamionowej. Od tej c
2tom255 6. NAPĘD ELEKTRYCZNY 512 silnik indukcyjny dla mocy mniejszych i średnich, zaś dla mocy duży
2tom257 6. NAPĘD ELEKTRYCZNY516 dzie sterowania US albo za pomocą regulacji prądu wyrównawczego, alb
2tom259 6. NAPĘD ELEKTRYCZNY6.5. Metody oraz układy regulacji i stabilizacji prędkości silników prąd
Parametry impulsów (czas impulsu, wartość amplitudy) i czas przerwy między impulsami mogą być regulo
2tom249 6. NAPĘD ELEKTRYCZNY 500 pod nabiegunnikiem — zwiększa się znacznie w przestrzeni międzybieg
Image502 programuje się czas trwania impulsu Tu odległość między impulsami w parze T2 oraz odległość
page0204 200 dokładniej wpływ ośrodka na natężenie sił elektrostatycznych, działających między ciała
• Klasa 4 - wyładowania w układzie dwóch elektrod płytowych, między którymi znajdu
NAPĘD ELEKTRYCZNY — wprawianie w „kontrolowany" ruch maszyn, urządzeń, konstrukcji
Wiadomości ogólne Rodzajów spawania Spawanie dwiema elektrodami wolframowymi, między którymi jarzy s
więcej podobnych podstron