2tom249
6. NAPĘD ELEKTRYCZNY 500
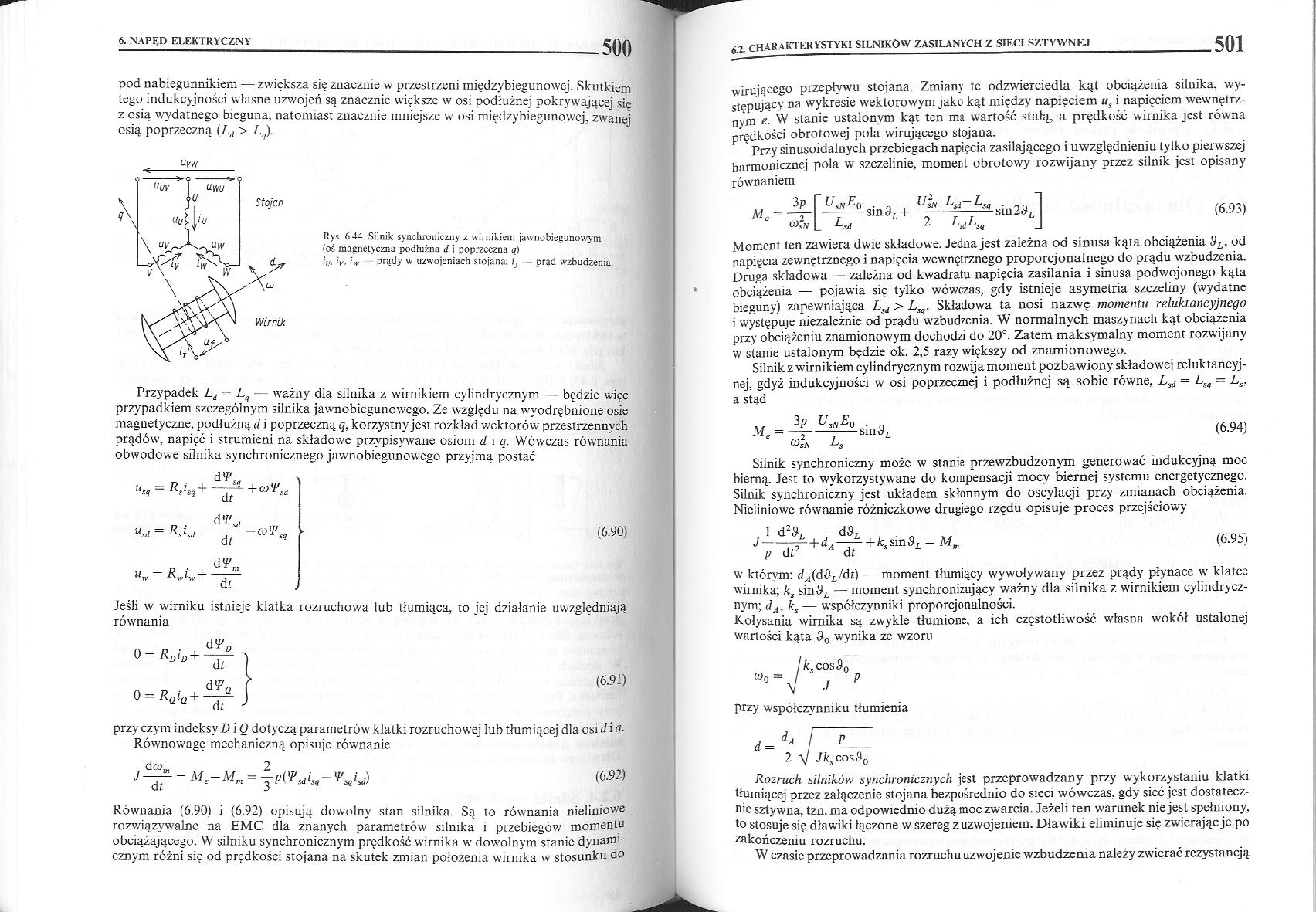
pod nabiegunnikiem — zwiększa się znacznie w przestrzeni międzybiegunowcj. Skutkiem tego indukcyjności własne uzwojeń są znacznie większe w osi podłużnej pokrywającej się 7. osią wydatnego bieguna, natomiast znacznie mniejsze w osi międzybiegunowej, zwanej osią poprzeczną (Ld > Lq).
Uvw
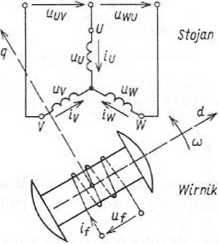
Rys. 6.44. Silnik synchroniczny z wirnikiem jawnobiegunowym
(oś magnetyczna podłużna d i poprzeczna q)
t|.f, »V» iw prądy w uzwojeniach stojana; if - prąd wzbudzenia
Przypadek Ld = Lą — ważny dla silnika z wirnikiem cylindrycznym będzie więc przypadkiem szczególnym silnika jawnobiegunowego. Ze względu na wyodrębnione osie magnetyczne, podłużną d i poprzeczną q, korzystny jest rozkład wektorów przestrzennych prądów-, napięć i strumieni na składowe przypisywane osiom d i q. Wówczas równania obwodowe silnika synchronicznego jawnobiegunowego przyjmą postać
d'P d*?..
di
dfm
(6.90)
dl
Jeśli w w-irniku istnieje klatka rozruchowa lub tłumiąca, to jej działanie uw-zględniają równania
0 — RDiD +
0 — Rq’q +
dVB
dt
dV,
~dt
Q
(6.91)
przy czym indeksy D i O dotyczą parametrów klatki rozruchow ej lub tłumiącej dla osi d i <?• Równow-agę mechaniczną opisuje równanie
(6.92)
Równania (6.90) i (6.92) opisują dowolny stan silnika. Są to równania nieliniowe rozwiązywalne na EMC dla znanych parametrów silnika i przebiegów momentu obciążającego. W silniku synchronicznym prędkość wirnika w dowolnym stanie dynamicznym różni się od prędkości stojana na skutek zmian położenia wirnika w stosunku do wirującego przepływu stojana. Zmiany te odzwierciedla kąt obciążenia silnika, występujący na wykresie wektorowym jako kąt między napięciem h, i napięciem wewnętrznym e. W stanie ustalonym kąt ten ma wartość stalą, a prędkość wirnika jest równa prędkości obrotowej pola wirującego stojana.
Przy sinusoidalnych przebiegach napięcia zasilającego i uwzględnieniu tylko pierwszej harmonicznej pola w szczelinie, moment obrotowy rozwijany przez silnik jest opisany równaniem
M
sin .9, +
Oj, L*-Lt 2
sin 28,
(6.93)
Moment ten zawiera dwie składowe. Jedna jest zależna od sinusa kąta obciążenia SL, od napięcia zewnętrznego i napięcia wewnętrznego proporcjonalnego do prądu wzbudzenia. Druga składowa — zależna od kwadratu napięcia zasilania i sinusa podwojonego kąta obciążenia — pojawia się tylko wówczas, gdy istnieje asymetria szczeliny (wydatne bieguny) zapewniająca L,d > Lsq. Składowa ta nosi nazwę momentu relukiancyjnego i występuje niezależnie od prądu wzbudzenia. W normalnych maszynach kąt obciążenia przy obciążeniu znamionowym dochodzi do 2Ó5. Zatem maksymalny moment rozwijany w stanie ustalonym będzie ok. 2,5 razy większy od znamionowego.
Silnik z wirnikiem cylindrycznym rozwija moment pozbawiony składowej reluktancyj-nej, gdyż indukcyjności w osi poprzecznej i podłużnej są sobie równe, Lqi = Lsq = Ls, a stąd
K
3 P t/lW£0
<OsN Ls
sin9Ł
(6.94)
Silnik synchroniczny może w stanie przewzbudzonym generować indukcyjną moc bierną. Jest to wykorzystywane do kompensacji mocy biernej systemu energetycznego. Silnik synchroniczny jest układem skłonnym do oscylacji przy zmianach obciążenia. Nieliniowe równanie różniczkowe drugiego rzędu opisuje proces przejściowy
1 d2S, dS,
J-----+dA —3-+k sin 9l — Mm (6.95)
p d£2 A dl
w którym: dA(A9JAt) — moment tłumiący wywoływany przez prądy płynące w klatce wirnika; ks sin9Ł — moment synchronizujący ważny dla silnika z wirnikiem cylindrycznym; dA, ks — współczynniki proporcjonalności.
Kołysania wirnika są zwykle tłumione, a ich częstotliwość własna wokół ustalonej wartości kąta !)0 wynika ze wzoru
k, COS Sn
przy współczynniku tłumienia
4 = /■ o
2 Jks cos90
Rozruch silników synchronicznych jest przeprowadzany przy wykorzystaniu klatki tłumiącej przez załączenie stojana bezpośrednio do sieci wówczas, gdy sieć jest dostatecznie sztywna, tzn. ma odpowiednio dużą moc zwarcia. Jeżeli ten warunek nie jest spełniony, to stosuje się dławiki łączone w szereg z uzwojeniem. Dławiki eliminuje się zwierając je po zakończeniu rozruchu.
W czasie przeprowadzania rozruchu uzwojenie wzbudzenia należy zwierać rezystancją
Wyszukiwarka
Podobne podstrony:
2tom248 6. NAPĘD ELEKTRYCZNY 498 Prąd w uzwojeniu wirnika wyznacza się z zależnościl/J &
2tom242 6. NAPĘD ELEKTRYCZNY 486 6. NAPĘD ELEKTRYCZNY 486 Rys. 6.24. Charakterystyka silnika szerego
Napęd elektrycznyĆwiczenia laboratoryjne Pod redakcję Teresy Orłowskiej-Kowalskiej Oficyna
2tom238 6. NAPĘD ELEKTRYCZNY 478 Odciążony silnik zwiększa swą prędkość do ok. Qorl = V<j}llxPeN,
2tom240 6. NAPĘD ELEKTRYCZNY 482 Q0N < O, a drugi QB np. jeździe pojazdu po pochyłości, przy czym
2tom241 6. NAPĘD ELEKTRYCZNY 484 Rys. 6.22. Silnik szeregowy prądu stałego: a) schemat połączeń; b)
2tom243 6. NAPĘD ELEKTRYCZNY 488 Rys. 6.27. Hamowanie silnikiem szeregowym (schematy i charakterysty
2tom244 6. NAPĘD ELEKTRYCZNY 490 statyczna odpowiada stosunkowi 0sN:0b k 2. Przy biegu jałowym, gdy
2tom245 6. NAPĘD ELEKTRYCZNY 492 w których wprowadzono operatory obrotu 6. NAPĘD ELEKTRYCZNY 4921 V3
2tom246 6. NAPĘD ELEKTRYCZNY 494 Rys. 6.33. Oscylacyjny przebieg prędkości kątowej a — przy odciążen
2tom247 6. NAPĘD ELEKTRYCZNY 496 w granicach (0,25-0,5)/,,. * J* < Is < Ik * (8-=-10)/*. W sil
214 Munk i Freund— przy nicdostatecznem odżywianiu wydzielanie wapna z ustroju zwiększa się w znaczn
lastscan34 * Zwiększenia się przepływu informacji miedzy państwami ■
74u 74 I okładzie trójfazowym zwiększa się zatem napięcie między zaciskami w fazie B do 2,5^2 U, co
Meridian osierdzia Meridian osierdzia Rozpoczyna się w czwartej przestrzeni międzyżebrowej, 1 cun na
IMAG0221 Wnioski z zasad rozbudowy powłok elektronowych W miarę zwiększania się liczby atomowej powt
page0119 115 w miarę zwiększania się masy głównej nebulozy, uderzające na nią ciała musiały spadać p
Prawo indukcji elektromagnetycznej Faradaya 18 •Strumień indukcji magnetycznej (O) zwiększający się
więcej podobnych podstron