2tom246
6. NAPĘD ELEKTRYCZNY 494
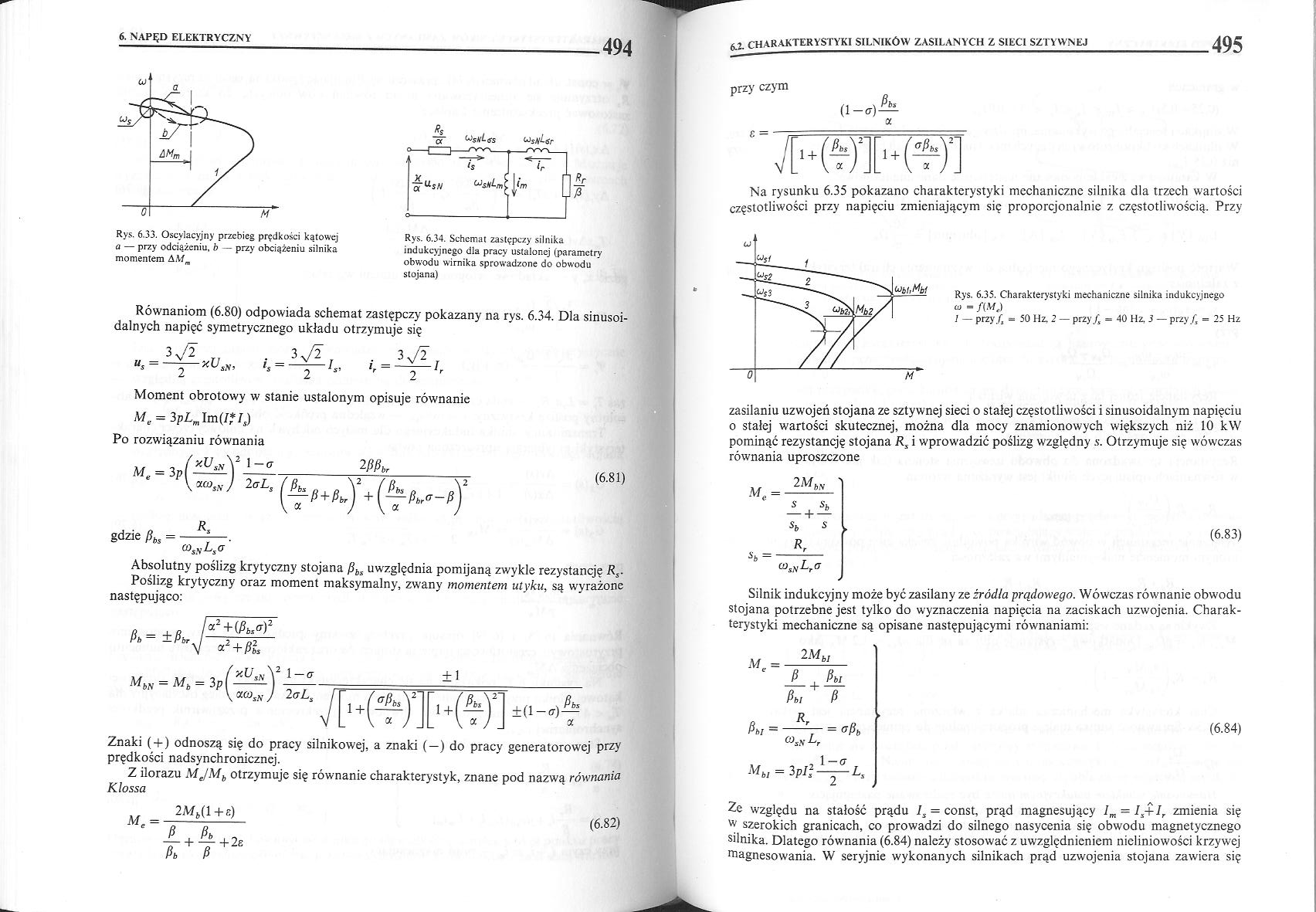
Rys. 6.33. Oscylacyjny przebieg prędkości kątowej a — przy odciążeniu, b — przy obciążeniu silnika momentem AMm
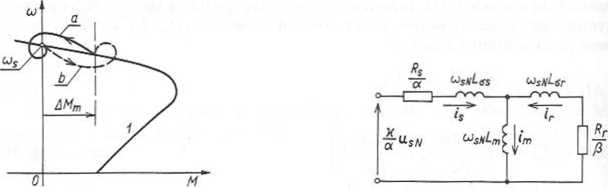
Rys. 6.34. Schemat zastępczy silnika indukcyjnego dla pracy ustalonej (parametry obwodu wirnika sprowadzone do obwodu stojana)
Równaniom (6.80) odpowiada schemat zastępczy pokazany na rys. 6.34. Dla sinusoidalnych napięć symetrycznego układu otrzymuje się
3 J2

Moment obrotowy w stanie ustalonym opisuje równanie Me = 3pLmIrn(/*/s)
Po rozwiązaniu równania
1 —a
2aLt '
m
(6.81)
gdzie pbs =
Absolutny poślizg krytyczny stojana Pbs uwzględnia pomijaną zwykle rezystancję Rs-Poślizg krytyczny oraz moment maksymalny, zwany momentem utyku, są wyrażone następująco:
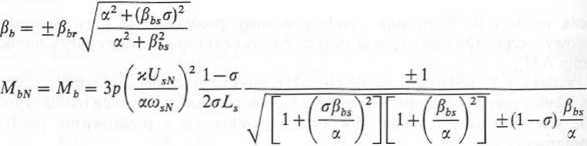
Znaki (+) odnoszą się do pracy silnikowej, a znaki (—) do pracy generatorowej przy prędkości nadsynchronicznej.
Z ilorazu MJMb otrzymuje się równanie charakterystyk, znane pod nazwą równania Klossa
(6.82)
M,
2Mt(l+s)
'LA
Jb+J+2E
Na rysunku 6.35 pokazano charakterystyki mechaniczne silnika dla trzech wartości częstotliwości przy napięciu zmieniającym się proporcjonalnie z częstotliwością. Przy
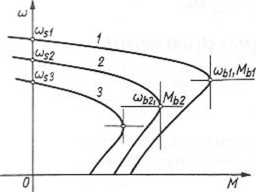
Rys. 6.35. Charakterystyki mechaniczne silnika indukcyjnego w = f(M.)
1 — przy fs = 50 Hz. 2 — przy,/'. = 40 Hz. 3 — przy fs = 25 Hz
zasilaniu uzwojeń stojana ze sztywnej sieci o stałej częstotliwości i sinusoidalnym napięciu o stałej wartości skutecznej, można dla mocy znamionowych większych niż 10 kW pominąć rezystancję stojana Rs i wprowadzić poślizg względny s. Otrzymuje się wówczas równania uproszczone
M. = -
2 M,
bS
(6.83)
tosNLro
Silnik indukcyjny może być zasilany ze źródła prądowego. Wówczas równanie obwodu stojana potrzebne jest tylko do wyznaczenia napięcia na zaciskach uzwojenia. Charakterystyki mechaniczne są opisane następującymi równaniami:
Pb, P
(6.84)
pb,=-V=°pb
= 3 pli^-L,
Ze względu na stałość prądu Is = const, prąd magnesujący lm = Is+Ir zmienia się w szerokich granicach, co prowadzi do silnego nasycenia się obwodu magnetycznego silnika. Dlatego równania (6.84) należy stosować z uwzględnieniem nieliniowości krzywej magnesowania. W seryjnie wykonanych silnikach prąd uzwojenia stojana zawiera się
Wyszukiwarka
Podobne podstrony:
3tom056 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 114 Rys. 2.33. Przykładowy przebieg rozprężania pary w t
2tom241 6. NAPĘD ELEKTRYCZNY 484 Rys. 6.22. Silnik szeregowy prądu stałego: a) schemat połączeń; b)
2tom243 6. NAPĘD ELEKTRYCZNY 488 Rys. 6.27. Hamowanie silnikiem szeregowym (schematy i charakterysty
2tom242 6. NAPĘD ELEKTRYCZNY 486 6. NAPĘD ELEKTRYCZNY 486 Rys. 6.24. Charakterystyka silnika szerego
2tom251 6. .NAPĘD ELEKTRYCZNY 504 Rys. 6.45. Praca ciągła silnika przy zmiennym obciążeniu 1 — przeb
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
118 A.S. Jagiełło, .SV,s7(■/;/! elektromechaniczne dla elekti ykaw Rys. 75. Przebieg prędkości kąto
120 A S. Jngicllo, Systemy elektromechaniczne dla elektryków Rys. 79. Przebieg prędkości kątowej
2tom069 3. APARATY ELEKTRYCZNE 140 Rys. 3.49. Przykłady przebiegu charakterystyki zapłonowej odgromn
2tom239 6. NAPĘD ELEKTRYCZNY 480 Rys. 6.17. Hamowanie silnikiem bocznikowym: a) charakterystyki: / —
2tom240 6. NAPĘD ELEKTRYCZNY 482 Q0N < O, a drugi QB np. jeździe pojazdu po pochyłości, przy czym
2tom244 6. NAPĘD ELEKTRYCZNY 490 statyczna odpowiada stosunkowi 0sN:0b k 2. Przy biegu jałowym, gdy
2tom245 6. NAPĘD ELEKTRYCZNY 492 w których wprowadzono operatory obrotu 6. NAPĘD ELEKTRYCZNY 4921 V3
2tom247 6. NAPĘD ELEKTRYCZNY 496 w granicach (0,25-0,5)/,,. * J* < Is < Ik * (8-=-10)/*. W sil
2tom248 6. NAPĘD ELEKTRYCZNY 498 Prąd w uzwojeniu wirnika wyznacza się z zależnościl/J &
2tom249 6. NAPĘD ELEKTRYCZNY 500 pod nabiegunnikiem — zwiększa się znacznie w przestrzeni międzybieg
2tom265 6. NAPĘD ELEKTRYCZNY 532 6. NAPĘD ELEKTRYCZNY 532 Rys. 6.78. Trajektorie fazowe napędu
2tom266 6. NAPĘD ELEKTRYCZNY 534 6. NAPĘD ELEKTRYCZNY 534 Rys. 6.80, Przykładowe charakterystyki pom
więcej podobnych podstron