2tom242
6. NAPĘD ELEKTRYCZNY 486
6. NAPĘD ELEKTRYCZNY 486
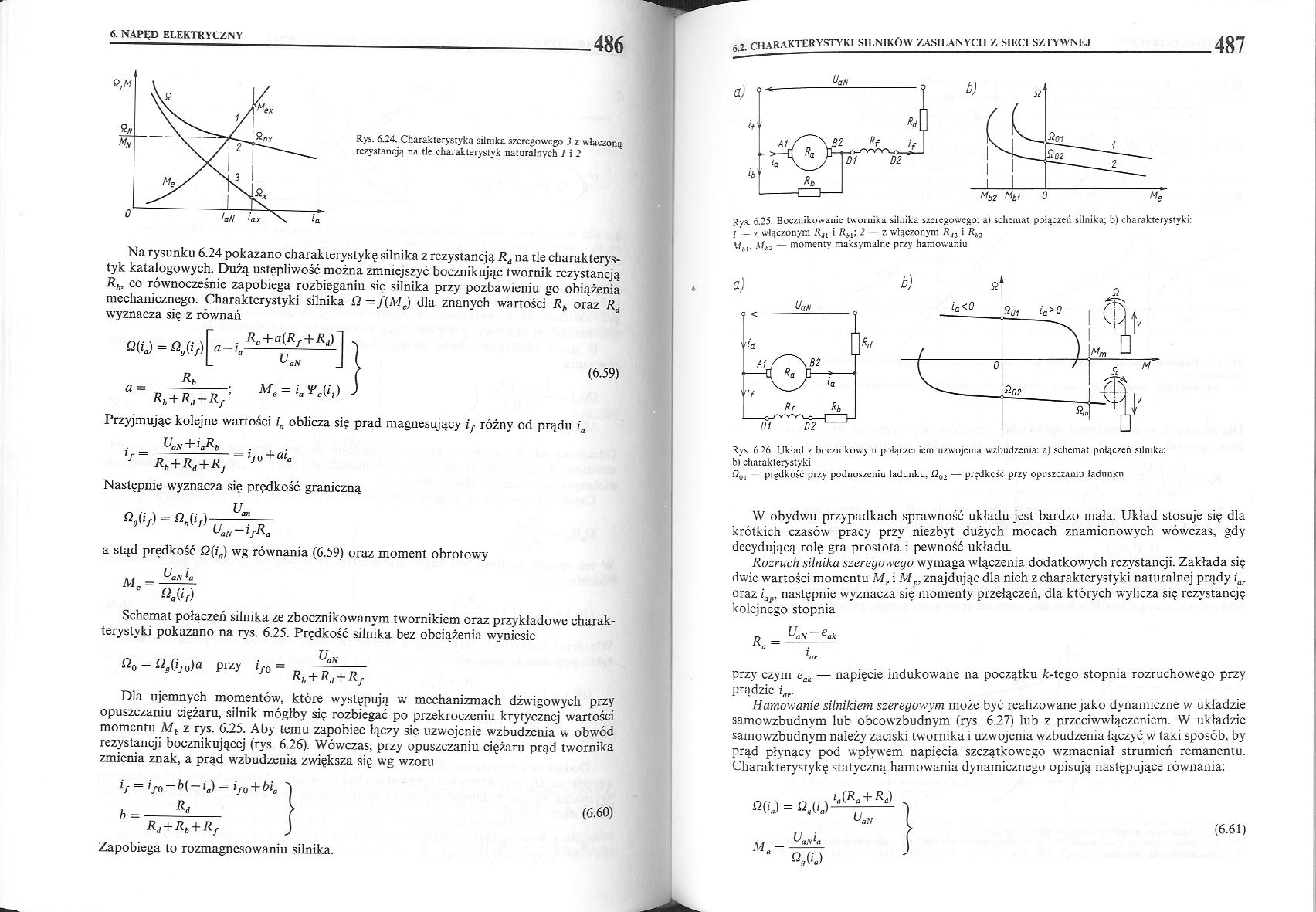
Rys. 6.24. Charakterystyka silnika szeregowego 3 z włączoną rezystancją na tle charakterystyk naturalnych 1 i 2
Na rysunku 6.24 pokazano charakterystykę silnika z rezystancją Rd na tle charakterystyk katalogowych. Dużą ustępliwość można zmniejszyć bocznikując twornik rezystancją Rb, co równocześnie zapobiega rozbieganiu się silnika przy pozbawieniu go obiążenia mechanicznego. Charakterystyki silnika Q = /(A4J dla znanych wartości Rh oraz Rd wyznacza się z równań
Rb+Rd+Rf
Ra + a(Rf + Rd)
' '
(6.59)
Przyjmując kolejne wartości ia oblicza się prąd magnesujący if różny od prądu ia
= ifO + <
Następnie wyznacza się prędkość graniczną
U-
U<iN~ifRa
a stąd prędkość Q(iJ wg równania (6.59) oraz moment obrotowy . , _ UgN L ■ e~ Wf)
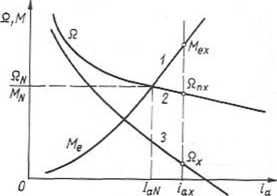
Schemat połączeń silnika ze zbocznikowanym twornikiem oraz przykładowe charakterystyki pokazano na rys. 6.25. Prędkość silnika bez obciążenia wyniesie
Q0 = Qq(iJ0)a przy if0 = —
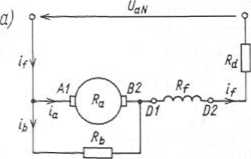
Dla ujemnych momentów, które występują w mechanizmach dźwigowych przy opuszczaniu ciężaru, silnik mógłby się rozbiegać po przekroczeniu krytycznej wartości momentu Mb z rys. 6.25. Aby temu zapobiec łączy się uzwojenie wzbudzenia w obwód rezystancji bocznikującej (rys. 6.26). Wówczas, przy opuszczaniu ciężaru prąd twornika zmienia znak, a prąd wzbudzenia zwiększa się wg wzoru
b = -
(6.60)
f
Zapobiega to rozmagnesowaniu silnika.
Rys. 6.25. Bocznikowanie twomika silnika szeregowego: a) schemat połączeń silnika; b) charakterystyki: / — z włączonym i Rbl; 2 z włączonym Ri Rb2 ilfM, \fh2 — momenty maksymalne przy hamowaniu
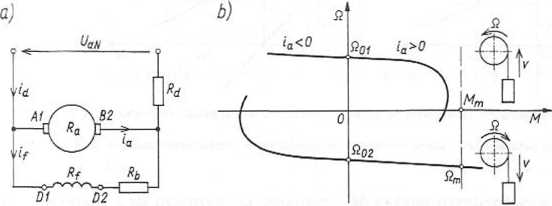
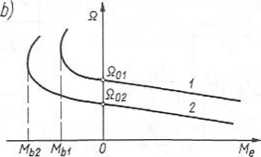
Rys. 6.26. Układ z bocznikowym połączeniem uzwojenia wzbudzenia: a) schemat połączeń silnika; b) charakterystyki
f20l prędkość przy podnoszeniu ładunku. i202 — prędkość przy opuszczaniu ładunku
W obydwu przypadkach sprawność układu jest bardzo mała. Układ stosuje się dla krótkich czasów pracy przy niezbyt dużych mocach znamionowych wówczas, gdy decydującą rolę gra prostota i pewność układu.
Rozruch silnika szeregowego wymaga włączenia dodatkowych rezystancji. Zakłada się dwie wartości momentu M, i Mp, znajdując dla nich z charakterystyki naturalnej prądy i„, oraz iap, następnie wyznacza się momenty przełączeń, dla których wylicza się rezystancję kolejnego stopnia
„ V* eak
R‘= — lar
przy czym eak — napięcie indukowane na początku k-tego stopnia rozruchowego przy prądzie iar.
Hamowanie silnikiem szeregowym może być realizowane jako dynamiczne w układzie samowzbudnym lub obcow'zbudnym (rys. 6.27) lub z przeciwwłączeniem. W układzie samowzbudnym należy zaciski twomika i uzwojenia wzbudzenia łączyć w taki sposób, by prąd płynący pod wpływem napięcia szczątkowego wzmacniał strumień remanentu. Charakterystykę statyczną hamowania dynamicznego opisują następujące równania:
M.=
(6.61)
Wyszukiwarka
Podobne podstrony:
2tom243 6. NAPĘD ELEKTRYCZNY 488 Rys. 6.27. Hamowanie silnikiem szeregowym (schematy i charakterysty
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
2tom239 6. NAPĘD ELEKTRYCZNY 480 Rys. 6.17. Hamowanie silnikiem bocznikowym: a) charakterystyki: / —
1tom175 7. ELEKTRONIKA 352 7. ELEKTRONIKA 352 Rys. 7.29. Charakterystyka napifciowo-prądowa obwodu g
3tom061 2 WYTWARZANIE ENERGII ELEKTRYCZNEJ 124 Rys. 2.47. Charakterystyka uniwersalna młyna misowo-r
2tom152 5. MASZYNY ELEKTRYCZNE 306 Rys. 5.45. Charakterystyki kątowe maszyny z cylindrycznym wirniki
2tom183 5. MASZYNY ELEKTRYCZNE 368 Rys. 5.103. Charakterystyka zewnętrzna U = /(/) prądnicy 1 obcowz
2tom209 5. MASZYNY ELEKTRYCZNE 420 Rys. 5.150. Charakterystyki mechaniczne (a) i sterowania (b):_amp
224 3 4. TURBINY PAROWE Rys. 4.24. Charakterystyka statyczna regulatora prędkości obrotowej
M031 (2.54) mu nu przedłużeniu osi głównej śruby nap iłowej (rys. 2.24). Moc silnika wynosi 8 do 11&
24 luty 07 (137) M. =a-bo) Ns =(a-bw )a N -a- 40 Rys. 3.131. Charakterystyka silnika o momencie lini
2tom241 6. NAPĘD ELEKTRYCZNY 484 Rys. 6.22. Silnik szeregowy prądu stałego: a) schemat połączeń; b)
2tom246 6. NAPĘD ELEKTRYCZNY 494 Rys. 6.33. Oscylacyjny przebieg prędkości kątowej a — przy odciążen
2tom240 6. NAPĘD ELEKTRYCZNY 482 Q0N < O, a drugi QB np. jeździe pojazdu po pochyłości, przy czym
2tom244 6. NAPĘD ELEKTRYCZNY 490 statyczna odpowiada stosunkowi 0sN:0b k 2. Przy biegu jałowym, gdy
2tom245 6. NAPĘD ELEKTRYCZNY 492 w których wprowadzono operatory obrotu 6. NAPĘD ELEKTRYCZNY 4921 V3
2tom247 6. NAPĘD ELEKTRYCZNY 496 w granicach (0,25-0,5)/,,. * J* < Is < Ik * (8-=-10)/*. W sil
2tom248 6. NAPĘD ELEKTRYCZNY 498 Prąd w uzwojeniu wirnika wyznacza się z zależnościl/J &
2tom249 6. NAPĘD ELEKTRYCZNY 500 pod nabiegunnikiem — zwiększa się znacznie w przestrzeni międzybieg
więcej podobnych podstron