2tom265
6. NAPĘD ELEKTRYCZNY 532
6. NAPĘD ELEKTRYCZNY 532
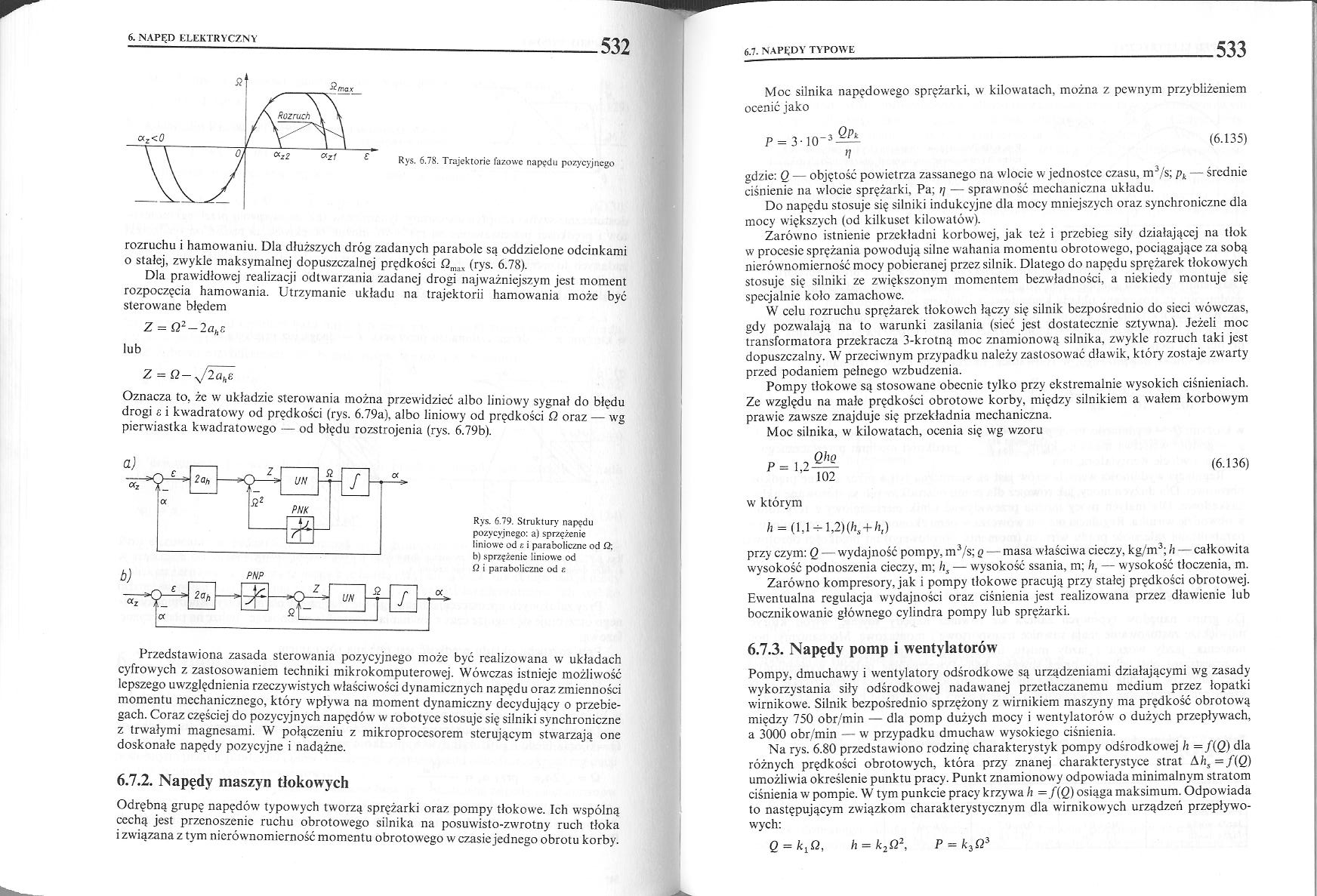
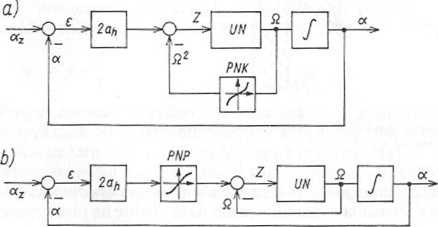
Rys. 6.78. Trajektorie fazowe napędu pozycyjnego
rozruchu i hamowaniu. Dla dłuższych dróg zadanych parabole są oddzielone odcinkami o stałej, zwykle maksymalnej dopuszczalnej prędkości £2m„ (rys. 6.78).
Dla prawidłowej realizacji odtwarzania zadanej drogi najważniejszym jest moment rozpoczęcia hamowania. Utrzymanie układu na trajektorii hamowania może być sterowane błędem
Z = Q2-2a„r. lub
Z = Q— ^/2ahe
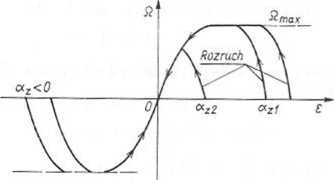
Oznacza to, że w układzie sterowania można przewidzieć albo liniowy sygnał do błędu drogi e i kwadratowy od prędkości (rys. 6.79a), albo liniowy od prędkości Q oraz — wg pierwiastka kwadratowego — od błędu rozstrojenia (rys. 6.79b).
Rys. 6.79. Struktury napędu pozycyjnego: a) sprzężenie liniowe od ?; i paraboliczne od Q\ b) sprzężenie liniowe od Q i paraboliczne od r.
Przedstawiona zasada sterowania pozycyjnego może być realizowana w układach cyfrowych z zastosowaniem techniki mikrokomputerowej. Wówczas istnieje możliwość lepszego uwzględnienia rzeczywistych właściwości dynamicznych napędu oraz zmienności momentu mechanicznego, który wpływa na moment dynamiczny decydujący o przebiegach. Coraz częściej do pozycyjnych napędów w robotyce stosuje się silniki synchroniczne z trwałymi magnesami. W połączeniu z mikroprocesorem sterującym stwarzają one doskonałe napędy pozycyjne i nadążne.
6.7.2. Napędy maszyn tłokowych
Odrębną grupę napędów typowych tworzą sprężarki oraz pompy tłokowe. Ich wspólną cechą jest przenoszenie ruchu obrotowego silnika na posuwisto-zwrotny ruch tłoka i związana z tym nicrównomicrność momentu obrotowego w czasie jednego obrotu korby.
Moc silnika napędowego sprężarki, w kilowatach, można z pewnym przybliżeniem ocenić jako
p = 310-3— (6.135)
1
gdzie: O — objętość powietrza zassanego na wlocie w jednostce czasu, m3/s; pk — średnie ciśnienie na wlocie sprężarki, Pa; t] — sprawność mechaniczna układu.
Do napędu stosuje się silniki indukcyjne dla mocy mniejszych oraz synchroniczne dla mocy większych (od kilkuset kilowatów).
Zarówno istnienie przekładni korbowej, jak też i przebieg siły działającej na tłok w procesie sprężania powodują silne wahania momentu obrotowego, pociągające za sobą nierównomierność mocy pobieranej przez silnik. Dlatego do napędu sprężarek tłokowych stosuje sic silniki ze zwiększonym momentem bezwładności, a niekiedy montuje się specjalnie kolo zamachowe.
W celu rozruchu sprężarek tlokowch łączy się silnik bezpośrednio do sieci wówczas, gdy pozwalają na to warunki zasilania (sieć jest dostatecznie sztywna). Jeżeli moc transformatora przekracza 3-krotną moc znamionową silnika, zwykle rozruch taki jest dopuszczalny. W przeciwnym przypadku należy zastosować dławik, który zostaje zwarty przed podaniem pełnego wzbudzenia.
Pompy tłokowe są stosowane obecnie tylko przy ekstremalnie wysokich ciśnieniach. Ze względu na małe prędkości obrotowe korby, między silnikiem a wałem korbowym prawie zawsze znajduje się przekładnia mechaniczna.
Moc silnika, w kilowatach, ocenia się wg wzoru

(6.136)
w którym
h = (lA^l,2)(hs+h,)
przy czym: 0 — wydajność pompy, m3/s; o — masa właściwa cieczy, kg/m3; h — całkowita wysokość podnoszenia cieczy, m; hs — wysokość ssania, m; h, — wysokość tłoczenia, m.
Zarówno kompresory, jak i pompy tłokowe pracują przy stałej prędkości obrotowej. Ewentualna regulacja wydajności oraz ciśnienia jest realizowana przez dławienie lub bocznikowanie głównego cylindra pompy lub sprężarki.
6.7.3. Napędy pomp i wentylatorów
Pompy, dmuchawy i wentylatory odśrodkowe są urządzeniami działającymi wg zasady wykorzystania siły odśrodkowej nadawanej przetłaczanemu medium przez łopatki wirnikowe. Silnik bezpośrednio sprzężony z wirnikiem maszyny ma prędkość obrotową między 750 obr/min — dla pomp dużych mocy i wentylatorów o dużych przepływach, a 3000 obr/min — w przypadku dmuchaw wysokiego ciśnienia.
Na rys. 6.80 przedstawiono rodzinę charakterystyk pompy odśrodkowej h = f(Q) dla różnych prędkości obrotowych, która przy znanej charakterystyce strat Ahs = f(Q) umożliwia określenie punktu pracy. Punkt znamionowy odpowiada minimalnym stratom ciśnienia w pompie. W tym punkcie pracy krzywa h - f(Q) osiąga maksimum. Odpowiada to następującym związkom charakterystycznym dla wirnikowych urządzeń przepływowych:
h = kzQ2, P = k3fl3
Q = kkQ,
Wyszukiwarka
Podobne podstrony:
3tom081 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 164 Rys. 2.78. Podstawowe rodzaje układów cieplnych elek
2tom266 6. NAPĘD ELEKTRYCZNY 534 6. NAPĘD ELEKTRYCZNY 534 Rys. 6.80, Przykładowe charakterystyki pom
2tom242 6. NAPĘD ELEKTRYCZNY 486 6. NAPĘD ELEKTRYCZNY 486 Rys. 6.24. Charakterystyka silnika szerego
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
2tom239 6. NAPĘD ELEKTRYCZNY 480 Rys. 6.17. Hamowanie silnikiem bocznikowym: a) charakterystyki: / —
2tom241 6. NAPĘD ELEKTRYCZNY 484 Rys. 6.22. Silnik szeregowy prądu stałego: a) schemat połączeń; b)
2tom243 6. NAPĘD ELEKTRYCZNY 488 Rys. 6.27. Hamowanie silnikiem szeregowym (schematy i charakterysty
2tom246 6. NAPĘD ELEKTRYCZNY 494 Rys. 6.33. Oscylacyjny przebieg prędkości kątowej a — przy odciążen
2tom251 6. .NAPĘD ELEKTRYCZNY 504 Rys. 6.45. Praca ciągła silnika przy zmiennym obciążeniu 1 — przeb
2tom260 6. NAPĘD ELEKTRYCZNY 522 Jeśli założyć, że czasy komutacji falownika napięciowego czy prądow
2tom261 6. NAPĘD ELEKTRYCZNY 524 prądu były odpowiednio „zorientowane” w stosunku do strumienia magn
2tom262 6. NAPĘD ELEKTRYCZNY -526 -7^ GSJTJTZLuzvuz. UZW 1 u u ri, 4- 2* . aw
2tom263 6. NAPĘD ELEKTRYCZNY 528 poślizgów (s—s0). Dla s > s0 jest wyrażony wzorem (6.126) ,
2tom264 6. NAPĘD ELEKTRYCZNY 530 Moc bierna dla pierwszej harmonicznej prądu jest wyrażona wzorem Q
2tom267 6. NAPĘD ELEKTRYCZNY 536 ładunku rr3. Czas rozruchu przy opuszczaniu pełnego ładunku pomija
Image423 Rys. 4.498. Schemat elektryczny układu Rys. 4.499. Schemat elektryczny ro
Materiały pomocnicze do laboratorium z Metrologii elektrycznej i elektronicznej Ip Rys. 12.3a Aby ni
Schowek04 (12) Rys. 2. Schemat nadajnika Rys. 4. Schemat elektryczny modelu Rys. 3
więcej podobnych podstron