2tom260
6. NAPĘD ELEKTRYCZNY 522
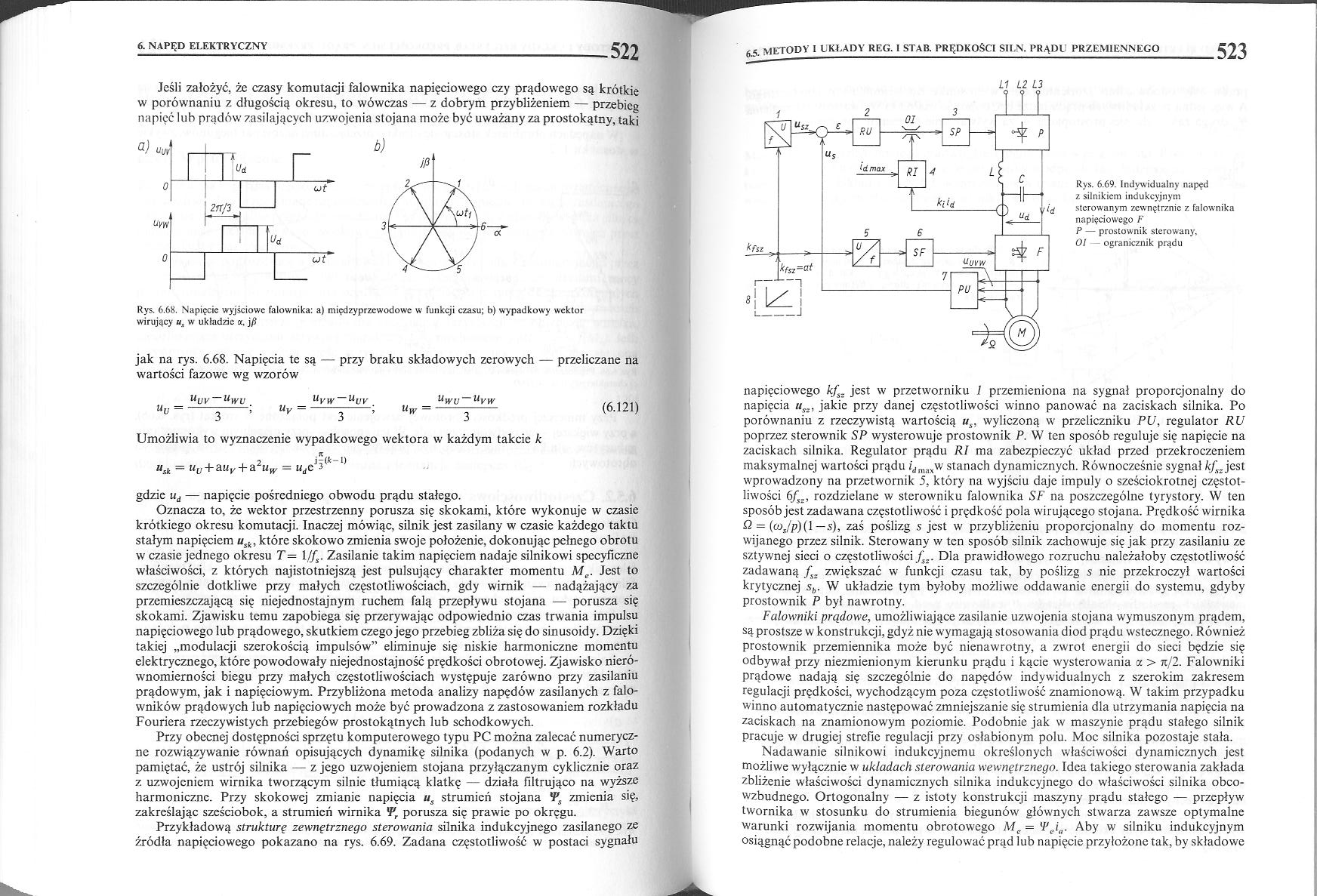
Jeśli założyć, że czasy komutacji falownika napięciowego czy prądowego są krótkie w porównaniu z długością okresu, to wówczas — z dobrym przybliżeniem — przebieg napięć lub prądów zasilających uzwojenia stojana może być uważany za prostokątny, taki
Rys. 6.68. Napięcie wyjściowe falownika: a) międzyprzewodowe w funkcji czasu; b) wypadkowy wektor wirujący ua w układzie a, j/?
jak na rys. 6.68. Napięcia tc są — przy braku składowych zerowych — przeliczane na wartości fazowe wg wzorów
uvv~un'v uvw~uvv uwv~uvw ,,
“u = —3—1 = —3—; uW =-j- (6.121)
Umożliwia to wyznaczenie wypadkowego wektora w każdym takcie k
> ix<*-n
usk = Uu + auy + a^Uw = ude 3
gdzie ud — napięcie pośredniego obwodu prądu stałego.
Oznacza to, że wektor przestrzenny porusza się skokami, które wykonuje w czasie krótkiego okresu komutacji. Inaczej mówiąc, silnik jest zasilany w czasie każdego taktu stałym napięciem usk, które skokowo zmienia swoje położenie, dokonując pełnego obrotu w czasie jednego okresu T = 1 /fs. Zasilanie takim napięciem nadaje silnikowi specyficzne właściwości, z których najistotniejszą jest pulsujący charakter momentu Me. Jest to szczególnie dotkliwe przy małych częstotliwościach, gdy wirnik — nadążający za przemieszczającą się niejednostajnym ruchem falą przepływu stojana — porusza się skokami. Zjawisku temu zapobiega się przerywając odpowiednio czas trwania impulsu napięciowego lub prądowego, skutkiem czego jego przebieg zbliża się do sinusoidy. Dzięki takiej „modulacji szerokością impulsów” eliminuje się niskie harmoniczne momentu elektrycznego, które powodowały niejednostajność prędkości obrotowej. Zjawisko nieró-wnomierności biegu przy małych częstotliwościach występuje zarówno przy zasilaniu prądowym, jak i napięciowym. Przybliżona metoda analizy napędów zasilanych z falowników prądowych lub napięciowych może być prowadzona z zastosowaniem rozkładu Fouriera rzeczywistych przebiegów prostokątnych lub schodkowych.
Przy obecnej dostępności sprzętu komputerowego typu I’C można zalecać numeryczne rozwiązywanie równań opisujących dynamikę silnika (podanych w p. 6.2). Warto pamiętać, że ustrój silnika — z jego uzwojeniem stojana przyłączanym cyklicznie oraz z uzwojeniem wirnika tworzącym silnie tłumiącą klatkę — działa filtrująco na wyższe harmoniczne. Przy skokowej zmianie napięcia us strumień stojana Vt zmienia się, zakreślając sześciobok, a strumień wirnika *Pr porusza się prawie po okręgu.
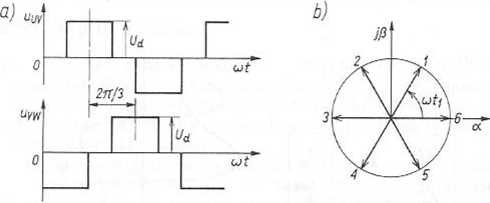
Przykładową strukturę zewnętrznego sterowania silnika indukcyjnego zasilanego ze źródła napięciowego pokazano na rys. 6.69. Zadana częstotliwość w postaci sygnału
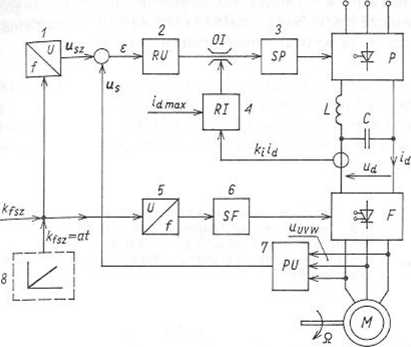
Rys. 6.69. Indywidualny napęd z silnikiem indukcyjnym sterowanym zewnętrznie z falownika napięciowego F P — prostownik sterowany,
01 ogranicznik prądu
napięciowego kfs, jest w przetworniku I przemieniona na sygnał proporcjonalny do napięcia uS2, jakie przy danej częstotliwości winno panować na zaciskach silnika. Po porównaniu z rzeczywistą wartością «s, wyliczoną w przeliczniku PU, regulator RU poprzez sterownik SP wysterowuje prostownik P. W ten sposób reguluje się napięcie na zaciskach silnika. Regulator prądu RI ma zabezpieczyć układ przed przekroczeniem maksymalnej wartości prądu idmaxw stanach dynamicznych. Równocześnie sygnał kfs= jest wprowadzony na przetwornik 5, który na w»yjściu daje impuly o sześciokrotnej częstotliwości ćfS2, rozdzielane w sterowniku falownika SF na poszczególne tyrystory. W ten sposób jest zadawana częstotliwość i prędkość pola wirującego stojana. Prędkość wirnika O = (cOj/p)(l — s), zaś poślizg s jest w przybliżeniu proporcjonalny do momentu rozwijanego przez silnik. Sterowany w ten sposób silnik zachowuje się jak przy zasilaniu ze sztywnej sieci o częstotliwości fS2. Dla prawidłowego rozruchu należałoby częstotliwość zadawaną fsz zwiększać w funkcji czasu tak, by poślizg s nie przekroczył wartości krytycznej sb. W układzie tym byłoby możliwa oddawanie energii do systemu, gdyby prostownik P był nawrotny.
Falowniki prądowe, umożliwiające zasilanie uzwojenia stojana wymuszonym prądem, są prostsze w konstrukcji, gdyż nie wymagają stosowania diod prądu wstecznego. Również prostownik przemiennika może być nienawrotny, a zwrot energii do sieci będzie się odbywał przy niezmienionym kierunku prądu i kącie wysterowania a > n/2. Falowniki prądowe nadają się szczególnie do napędów indywidualnych z szerokim zakresem regulacji prędkości, wychodzącym poza częstotliwość znamionową. W takim przypadku winno automatycznie następować zmniejszanie się strumienia dla utrzymania napięcia na zaciskach na znamionowym poziomie. Podobnie jak w maszynie prądu stałego silnik pracuje w drugiej strefie regulacji przy osłabionym polu. Moc silnika pozostaje stała.
Nadawanie silnikowi indukcyjnemu określonych właściwości dynamicznych jest możliwe wyłącznie w układach sterowania wewnętrznego. Idea takiego sterowania zakłada zbliżenie właściwości dynamicznych silnika indukcyjnego do właściwości silnika obco-W'zbudnego. Ortogonalny — z istoty konstrukcji maszyny prądu stałego — przepływ twornika w stosunku do strumienia biegunów głównych stwarza zawsze optymalne warunki rozwijania momentu obrotowego Me='Peia. Aby w silniku indukcyjnym osiągnąć podobne relacje, należy regulować prąd lub napięcie przyłożone tak, bv składowe
Wyszukiwarka
Podobne podstrony:
img038 (5) □ Jeśli założyć, że „trafienia” są statystycznie niezależne, to prawdopodobieństwo jednoc
Inflacja, pieniądz i deficyt budżetowy Jeśli założymy, że wielki deficyt budżetowy prowadzi do infla
CCF20090213�031 jeśli założymy, że komputer będzie się zajmował tym drobnym projektem w nieskończono
DSCF2502 26 2. Kombinatoryka stanu cywilnego (będący w związku małżeńskim lub nie) i zawodu. Jeśli z
P3040941 4J Wytoczenie elementów ściskanych Jeśli założymy, że ugięcie 8 na rys.4.2b jest małe, może
2tom253 6. NAPĘD ELEKTRYCZNY 508 Jeśli napięcie wzbudzenia generatora oznaczyć ufG = kull;GS, gdzie
2tom261 6. NAPĘD ELEKTRYCZNY 524 prądu były odpowiednio „zorientowane” w stosunku do strumienia magn
2tom262 6. NAPĘD ELEKTRYCZNY -526 -7^ GSJTJTZLuzvuz. UZW 1 u u ri, 4- 2* . aw
2tom263 6. NAPĘD ELEKTRYCZNY 528 poślizgów (s—s0). Dla s > s0 jest wyrażony wzorem (6.126) ,
2tom264 6. NAPĘD ELEKTRYCZNY 530 Moc bierna dla pierwszej harmonicznej prądu jest wyrażona wzorem Q
2tom265 6. NAPĘD ELEKTRYCZNY 532 6. NAPĘD ELEKTRYCZNY 532 Rys. 6.78. Trajektorie fazowe napędu
2tom266 6. NAPĘD ELEKTRYCZNY 534 6. NAPĘD ELEKTRYCZNY 534 Rys. 6.80, Przykładowe charakterystyki pom
2tom267 6. NAPĘD ELEKTRYCZNY 536 ładunku rr3. Czas rozruchu przy opuszczaniu pełnego ładunku pomija
Napęd elektryczny, sem. V Ogólna struktura układu napędowego ZE - źródło energii (elektrycznej), PK
więcej podobnych podstron