2tom262
6. NAPĘD ELEKTRYCZNY -526
-7^
GS
UZW
|
1 u u |
ri, 4- |
2* |
. aw | | |||
|
rav |
Ł <*V | |||||
|
r«i/ |
I V // |
i w n |
ay | |||
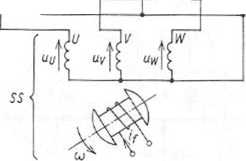
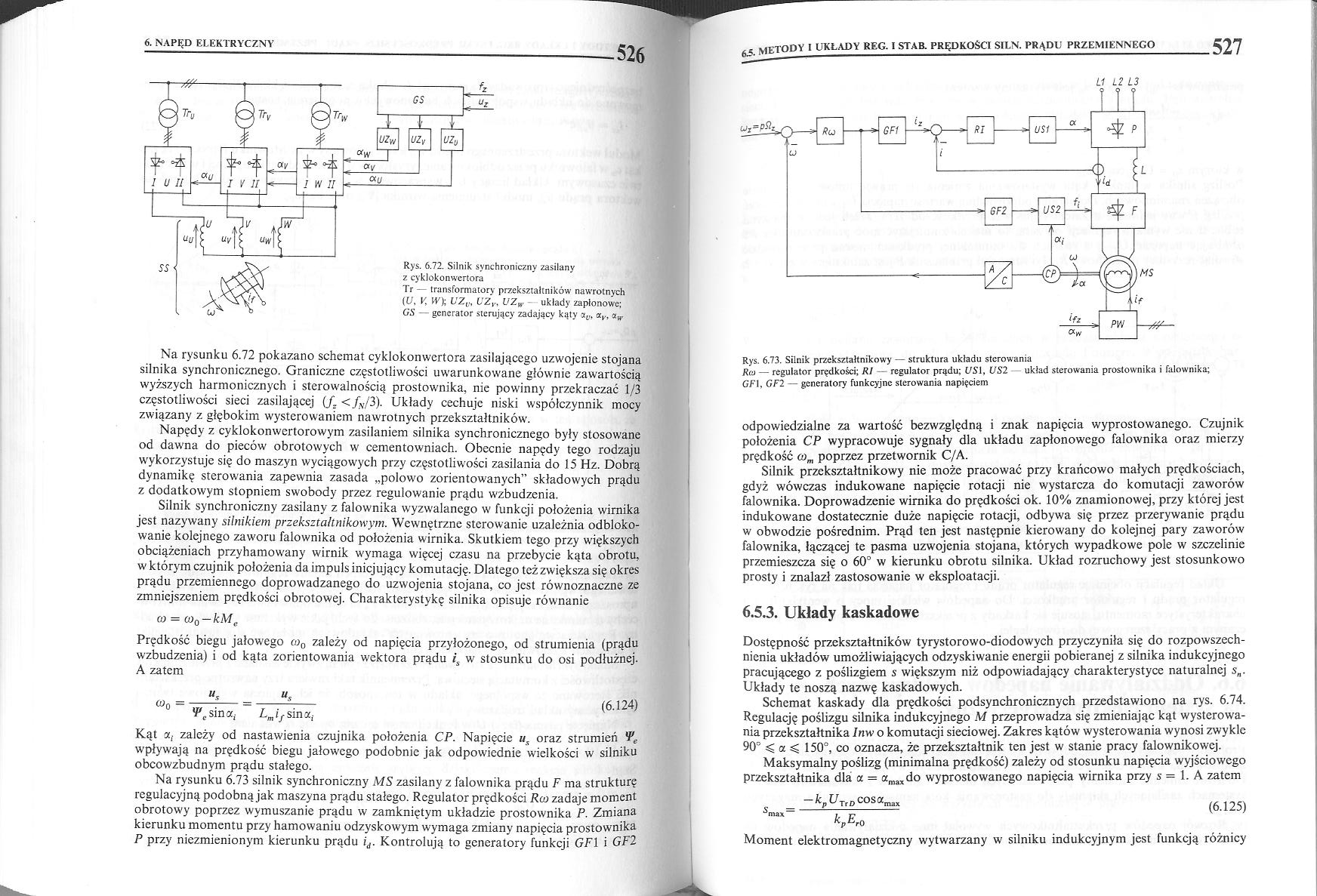
Rys. 6.72. Silnik synchroniczny zasilany z cyklokonwertora
I r - transformatory przekształtników nawrotnych (C\ K WO; l»rZt., Cr2r, t/ZM. układy zapłonowe; GS - generator sterujący zadający kąty xc„ ocy,
Na rysunku 6.72 pokazano schemat cyklokonwertora zasilającego uzwojenie stojana silnika synchronicznego. Graniczne częstotliwości uwarunkowane głównie zawartością wyższych harmonicznych i sterowalnością prostownika, nie powinny przekraczać 1/3 częstotliwości sieci zasilającej (/. <fN/3). Układy cechuje niski współczynnik mocy związany z głębokim wysterowaniem nawrotnych przekształtników.
Napędy z cyklokonwcrtorowym zasilaniem silnika synchronicznego były stosowane od dawna do pieców obrotowych w cementowniach. Obecnie napędy tego rodzaju wykorzystuje się do maszyn wyciągowych przy częstotliwości zasilania do 15 Hz. Dobrą dynamikę sterowania zapewnia zasada „polow'o zorientowanych” składowych prądu z dodatkowym stopniem swobody przez regulowanie prądu wzbudzenia.
Silnik synchroniczny zasilany z falownika wyzwalanego w funkcji położenia wirnika jest nazywany silnikiem przekształtnikowym. Wewnętrzne sterowanie uzależnia odblokowanie kolejnego zaworu falownika od położenia wirnika. Skutkiem tego przy większych obciążeniach przyhamowany wirnik wymaga więcej czasu na przebycie kąta obrotu, w którym czujnik położenia da impuls inicjujący komutację. Dlatego też zwiększa się okres prądu przemiennego doprowadzanego do uzwojenia stojana, co jest równoznaczne ze zmniejszeniem prędkości obrotowej. Charakterystykę silnika opisuje równanie
to = co0 — kMe
Prędkość biegu jałowego &>0 zależy od napięcia przyłożonego, od strumienia (prądu wzbudzenia) i od kąta zorientowania wektora prądu /s w stosunku do osi podłużnej. A zatem
(6124)
•Postna, Lmif sin ttj
Kąt z, zależy od nastawienia czujnika położenia CP. Napięcie a, oraz strumień Ve wpływają na prędkość biegu jałowego podobnie jak odpowiednie wielkości w silniku obcowzbudnym prądu stałego.
Na rysunku 6.73 silnik synchroniczny MS zasilany z falownika prądu F ma strukturę regulacyjną podobną jak maszyna prądu stałego. Regulator prędkości Ra> zadaje moment obrotowy poprzez wymuszanie prądu w zamkniętym układzie prostownika P. Zmiana kierunku momentu przy hamowaniu odzyskowym wymaga zmiany napięcia prostownika P przy niezmienionym kierunku prądu id. Kontrolują to generatory funkcji GF1 i GF2
L1 L2 L3
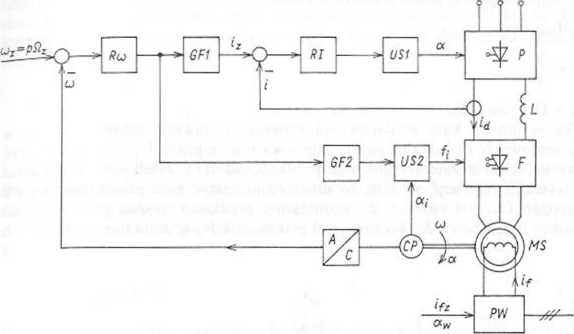
Rys. 6.73. Silnik przekształtnikowy — struktura układu sterowania
Rm — regulator prędkości; RI regulator prądu; US1, US2 układ sterowania prostownika i falownika; GF1, GF2 — generatory funkcyjne sterowania napięciem
odpowiedzialne za wartość bezwzględną i znak napięcia wyprostowanego. Czujnik położenia CP wypracowuje sygnały dla układu zapłonowego falownika oraz mierzy prędkość com poprzez przetwornik C/A.
Silnik przekształtnikowy nie może pracować przy krańcowo małych prędkościach, gdyż wówczas indukowane napięcie rotacji nie wystarcza do komutacji zaworów falownika. Doprowadzenie wirnika do prędkości ok. 10% znamionowej, przy której jest indukowane dostatecznie duże napięcie rotacji, odbywa się przez przerywanie prądu w obwodzie pośrednim. Prąd ten jest następnie kierowany do kolejnej pary zaworów falownika, łączącej te pasma uzwojenia stojana, których wypadkowe pole w szczelinie przemieszcza się o 60° w kierunku obrotu silnika. Układ rozruchowy jest stosunkowo prosty i znalazł zastosowanie w eksploatacji.
6.5.3. Układy kaskadowe
Dostępność przekształtników tyrystorowo-diodowych przyczyniła się do rozpowszechnienia układów umożliwiających odzyskiwanie energii pobieranej z silnika indukcyjnego pracującego z poślizgiem s większym niż odpowiadający charakterystyce naturalnej s„. Układy te noszą nazwę kaskadowych.
Schemat kaskady dla prędkości podsynchronicznych przedstawiono na rys. 6.74. Regulację poślizgu silnika indukcyjnego M przeprowadza się zmieniając kąt wysterowania przekształtnika Jnw o komutacji sieciowej. Zakres kątów wysterowania wynosi zwykle 90“ < a ^ 150°, co oznacza, że przekształtnik ten jest w stanie pracy falownikowej.
Maksymalny poślizg (minimalna prędkość) zależy od stosunku napięcia wyjściowego przekształtnika dla a = otma,do wyprostowanego napięcia wirnika przy s = 1. A zatem
s
max
-k„UTrD cos a
max
kpP, o
(6.125)
Moment elektromagnetyczny wytwarzany w silniku indukcyjnym jest funkcją różnicy
Wyszukiwarka
Podobne podstrony:
2tom260 6. NAPĘD ELEKTRYCZNY 522 Jeśli założyć, że czasy komutacji falownika napięciowego czy prądow
2tom261 6. NAPĘD ELEKTRYCZNY 524 prądu były odpowiednio „zorientowane” w stosunku do strumienia magn
2tom263 6. NAPĘD ELEKTRYCZNY 528 poślizgów (s—s0). Dla s > s0 jest wyrażony wzorem (6.126) ,
2tom264 6. NAPĘD ELEKTRYCZNY 530 Moc bierna dla pierwszej harmonicznej prądu jest wyrażona wzorem Q
2tom265 6. NAPĘD ELEKTRYCZNY 532 6. NAPĘD ELEKTRYCZNY 532 Rys. 6.78. Trajektorie fazowe napędu
2tom266 6. NAPĘD ELEKTRYCZNY 534 6. NAPĘD ELEKTRYCZNY 534 Rys. 6.80, Przykładowe charakterystyki pom
2tom267 6. NAPĘD ELEKTRYCZNY 536 ładunku rr3. Czas rozruchu przy opuszczaniu pełnego ładunku pomija
NAPĘD ELEKTRYCZNY — wprawianie w „kontrolowany" ruch maszyn, urządzeń, konstrukcji
ScanImage06 Napęd elektryczny Napęd elektryczny, jest to napędzanie maszyny roboczej, np. pompy za p
P2/AIRPT/10. Napęd elektryczny i sterowanie przetworników elektromechanicznych-10h W, 10h L Cel: Głó
Sylabus Kod przedmiotu ES1A500038 Nazwa przedmiotu Napęd elektryczny Kierunek
4. Gogolewski Z., Kuczewski Z.: Napęd elektryczny. Warszawa WNT 1984 5.
Napęd elektryczny jako dziedzina systemowa należy do grupy przedmiotów_specjalizacyjnych_ Technika
XXI wiek... 6-kariera?Napęd elektryczny - dziedzina systemowa (kojarzona niegdyś tylko z maszynami
„Madę in ZNE”6 - kariera? Napęd elektryczny - dziedzina systemowa integruje zagadnienia: maszyn
NAPĘD ELEKTRYCZNY - program Electrical Drive - Power Electronic Drive - Motion Control,Intelligent C
NAPĘD ELEKTRYCZNY - program Electrical Drive - Power Electronic Drive - Motion Control, Intelligent
więcej podobnych podstron