2tom261
6. NAPĘD ELEKTRYCZNY 524
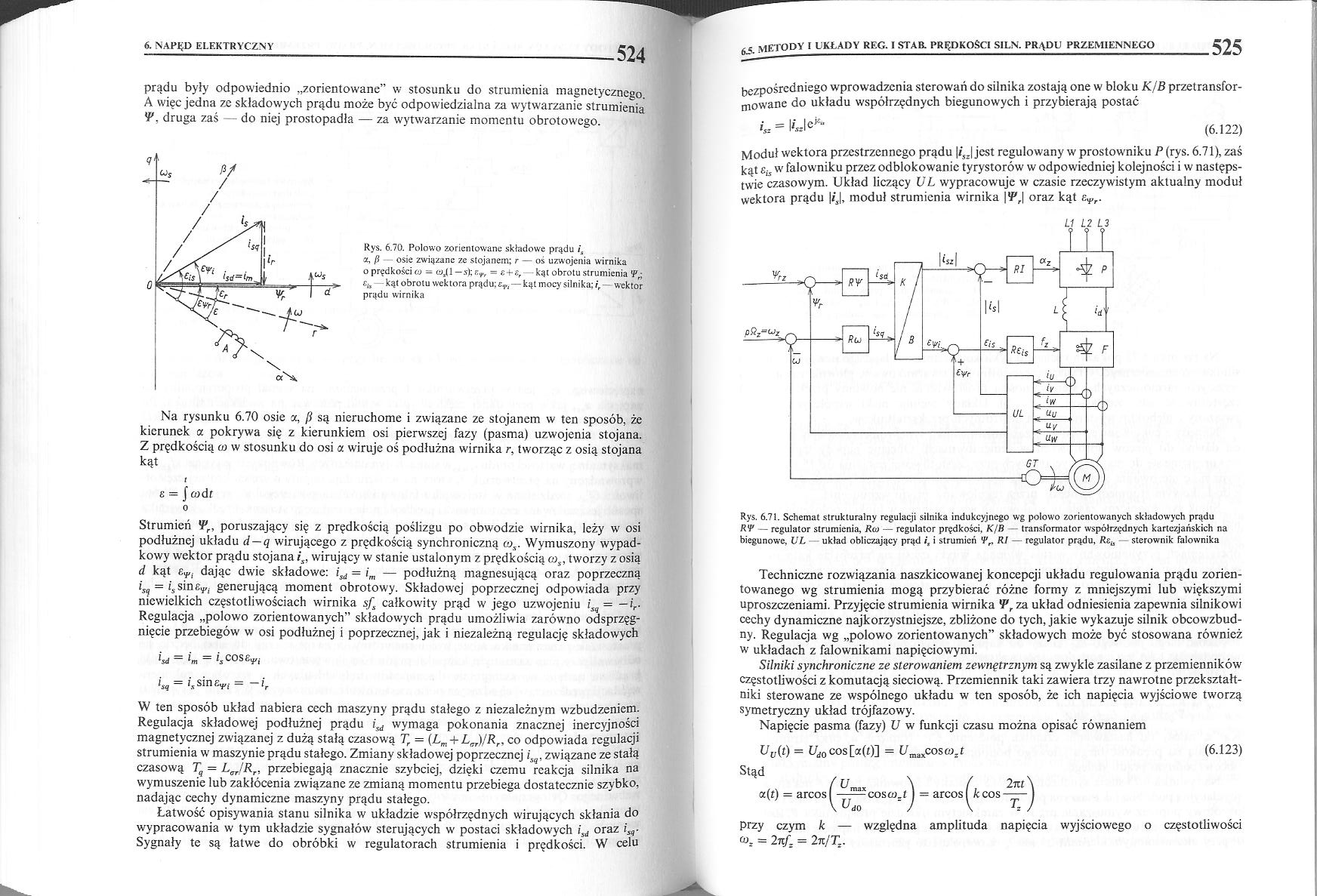
prądu były odpowiednio „zorientowane” w stosunku do strumienia magnetycznego A więc jedna ze składowych prądu może być odpowiedzialna za wytwarzanie strumienia V. druga zaś — do niej prostopadła — za wytwarzanie momentu obrotow-cgo.

Rys. 6.70. Połowo zorientowano składowe prądu a, fi osie związane ze stojanem; r — oś uzwojenia wirnika o prędkości o) — cy,( 1 — s); t:Vr = e -ł- sr kąt obrotu strumienia ^ ch kąt obrotu wektora prądu: cVi — kąt mocy silnika; rr wektor
prądu wirnika
Na rysunku 6.70 osie a, p są nieruchome i związane ze stojanem w ten sposób, że kierunek a pokrywa się z kierunkiem osi pierwszej fazy (pasma) uzwojenia stojana. Z prędkością co w stosunku do osi a wiruje oś podłużna wirnika r, tworząc z osią stojana kąt
t
s = J codr o
Strumień Vr, poruszający się z prędkością poślizgu po obwodzie wirnika, leży w osi podłużnej układu d — ą wirującego z prędkością synchroniczną ws. Wymuszony wypadkowy wektor prądu stojana is, wirujący w stanie ustalonym z prędkością cos, tworzy z osią d kąt eVi dając dwie składowe: isd = im — podłużną magnesującą oraz poprzeczną is, = issinevi generującą moment obrotowy. Składowej poprzecznej odpowiada przy niewielkich częstotliwościach wirnika sfs całkowity prąd w jego uzwojeniu isq = —ir-Regulacja „połowo zorientowanych” składowych prądu umożliwia zarówno odsprzęg-nięcie przebiegów w osi podłużnej i poprzecznej, jak i niezależną regulację składowych
hd = »m = i, cose^
Lq = ',sinfv, = — tr
W ten sposób układ nabiera cech maszyny prądu stałego z niezależnym wzbudzeniem. Regulacja składowej podłużnej prądu wymaga pokonania znacznej inercyjności magnetycznej związanej z dużą stałą czasową Tr = (Lm + L„r)/Rr, co odpowiada regulacji strumienia w maszynie prądu stałego. Zmiany składowej poprzecznej i , związane ze stałą czasową Tq = LcJRr, przebiegają znacznie szybciej, dzięki czemu reakcja silnika na wymuszenie lub zakłócenia związane ze zmianą momentu przebiega dostatecznie szybko, nadając cechy dynamiczne maszyny prądu stałego.
Łatwość opisywania stanu silnika w układzie współrzędnych wirujących skłania do wypracowania w tym układzie sygnałów sterujących w postaci składowych isd oraz i Sygnały te są łatwe do obróbki w regulatorach strumienia i prędkości. W celu
bezpośredniego wprowadzenia sterowań do silnika zostają one w bloku K/B przetransfor-mowane do układu współrzędnych biegunowych i przybierają postać
is._ = (6.122)
Moduł wektora przestrzennego prądu |is.| jest regulowany w prostowniku P (rys. 6.71), zaś kąt sis w falowniku przez odblokowanie tyrystorów w odpowiedniej kolejności i w następstwie czasowym. Układ liczący UL wypracowuje w czasie rzeczywistym aktualny moduł wektora prądu |»J, moduł strumienia wirnika |¥',| oraz kąt eVr.
L1 L2 L3
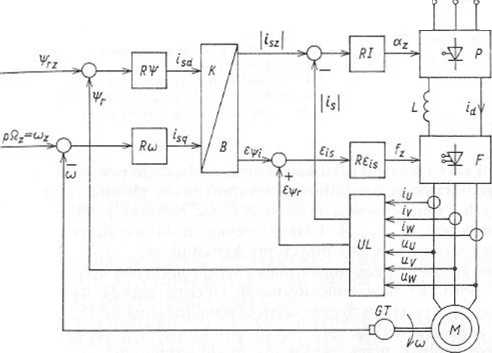
Rys. 6.71. Schemat strukturalny regulacji silnika indukcyjnego wg połowo zorientowanych składowych prądu RW — regulator strumienia, Rw — regulator prędkości, K/B transformator współrzędnych kartezjańskich na biegunowe, UL układ obliczający prąd it i strumień RI — regulator prądu, Re^ - sterownik falownika
Techniczne rozwiązania naszkicowanej koncepcji układu regulowania prądu zorientowanego wg strumienia mogą przybierać różne formy z mniejszymi lub większymi uproszczeniami. Przyjęcie strumienia wirnika V, za układ odniesienia zapewnia silnikowi cechy dynamiczne najkorzystniejsze, zbliżone do tych, jakie wykazuje silnik obcowzbud-ny. Regulacja wg „połowo zorientowanych” składowych może być stosowana również w układach z falownikami napięciowymi.
Silniki synchroniczne ze sterowaniem zewnętrznym są zwykle zasilane z przemienników częstotliwości z komutacją sieciową. Przemiennik taki zawiera trzy nawrotne przekształtniki sterowane ze wspólnego układu w ten sposób, że ich napięcia wyjściowe tworzą symetryczny układ trójfazowy.
Napięcie pasma (fazy) U w funkcji czasu można opisać równaniem
Uv(t) = Ud0 cos [<*(£)] = Umaxcosw.t (6.123)

Stąd (U \
a(t) = arcosI ——coswzt) - arcos
\ UdO J
przy czym k — względna amplituda napięcia wyjściowego o częstotliwości w, = 2nf, = 2n/T..
Wyszukiwarka
Podobne podstrony:
2tom264 6. NAPĘD ELEKTRYCZNY 530 Moc bierna dla pierwszej harmonicznej prądu jest wyrażona wzorem Q
2tom260 6. NAPĘD ELEKTRYCZNY 522 Jeśli założyć, że czasy komutacji falownika napięciowego czy prądow
2tom262 6. NAPĘD ELEKTRYCZNY -526 -7^ GSJTJTZLuzvuz. UZW 1 u u ri, 4- 2* . aw
2tom263 6. NAPĘD ELEKTRYCZNY 528 poślizgów (s—s0). Dla s > s0 jest wyrażony wzorem (6.126) ,
2tom265 6. NAPĘD ELEKTRYCZNY 532 6. NAPĘD ELEKTRYCZNY 532 Rys. 6.78. Trajektorie fazowe napędu
2tom266 6. NAPĘD ELEKTRYCZNY 534 6. NAPĘD ELEKTRYCZNY 534 Rys. 6.80, Przykładowe charakterystyki pom
2tom267 6. NAPĘD ELEKTRYCZNY 536 ładunku rr3. Czas rozruchu przy opuszczaniu pełnego ładunku pomija
2tom238 6. NAPĘD ELEKTRYCZNY 478 Odciążony silnik zwiększa swą prędkość do ok. Qorl = V<j}llxPeN,
Czy będziemy dawać napęd od korby wyprzedzającej, czy opóźniającej się w stosunku do korby danego cy
CCF20130608�005 144 Behawioryzrn i fenomenologia sposobów poznania w odpowiednich proporcjach w stos
DSC04354 Efekt cytotoksyczny w restrykcji MHC Odpowiedź cytotoksyczna w stosunku do: j własnych MHC
Zdjęcie018 lerancja rak swoistej odpowiedzi tmunologicznej w stosunku do ściśle kreślonego
odpowiedzi na kolosa page 001 Zagadnienia wstępne, prądy stałe 1. Natężenie prądu elektrycznego i gę
2tom241 6. NAPĘD ELEKTRYCZNY 484 Rys. 6.22. Silnik szeregowy prądu stałego: a) schemat połączeń; b)
2tom244 6. NAPĘD ELEKTRYCZNY 490 statyczna odpowiada stosunkowi 0sN:0b k 2. Przy biegu jałowym, gdy
2tom252 6. NAPĘD ELEKTRYCZNY -5066.4. Metody oraz układy regulacji i stabilizacji prędkości silników
więcej podobnych podstron