2tom238
6. NAPĘD ELEKTRYCZNY 478
Odciążony silnik zwiększa swą prędkość do ok. Qorl = V<j}llxPeN, co jest zjawiskiem niekorzystnym. Dla zapobieżenia temu bocznikuje się twornik rezystorem Rh (rys. 6.15). Charakterystyki silnika opisuje wówczas równanie
6. NAPĘD ELEKTRYCZNY 478
M R + aR.
Ua
(6.36)
Jest ono ważne dla znamionowych wartości napięcia UaN i znamionowego strumienia przy załączonych rezystancjach Rd i Rh = Rda/(l—a), które oblicza się na podstawie danych wielkości Qx, Mex oraz Q0x = aC20fl wykorzystując zależność (6.36). W wyniku zbocznikowania (b) twornika maleje ustępliwość charakterystyki
( dQ\ R+aRj __ d£2 R + Rd
V,„ <dM7_ VtK
lecz także silnie zmniejsza się sprawność
Q ia Q
n. = 7r—— < TT—
UON !d “oN
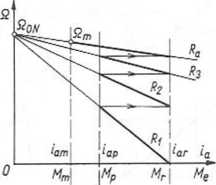
Rozruchu silnika należy dokonywać włączając rezystory dodatkowe. Na ogół podczas rozruchu prąd jest w przedziale iap < ia < iar, gdzie iar — największy prąd rozruchowy, iap — prąd, przy którym następuje wyłączenie kolejnej sekcji rezystora rozrusznika (rys. 6.16). Prądy rozruchowy i przełączenia mieszczą się zwykle w granicach [6.3]
(6.37)
1.5IaN < L < (1,8-2,8)laN
1,1 lam < iap < 1,4Iam
Wartości większe odnoszą się do tzw. rozruchu ciężkiego z dużymi momentami bezwładności i obciążeniem mechanicznym, prąd zaś Iam — MJWe odpowiada temu właśnie obciążeniu. Liczba stopni rozrusznika wynika ze wzoru
. U as
l8TT
k =-5L_L (6.38)
Jest ona zaokrąglana do liczby całkowitej.
Rezystancje kolejnych stopni są następujące:
R, =~rL; R2 = R,^L; R3 = R2—... itd. (6.39)
Lr Lr Lr
Sekcje rezystorowe mają rezystancję
ri=R1 — R2; r2 = R2 — R3 ... itd.
Schemat rozruchu 3-stopniowego oraz przebieg charakterystyk na poszczególnych stopniach pokazano na rys. 6.16. Przy założeniu, że wyłączenia kolejnych sekcji rezystora rozruchowego następują w chwilach, gdy prąd osiąga wartość iap — czas rozruchu byłby wyrażony zależnością
tr
= J
ln
Mr-Mm
Mp-Mm
(6.40)
w której Mp — moment przełączania.
Niezbędną do obliczeń wartość rezystancji twornika szacuje się na podstawie danych katalogowych silnika zawierających zwykle następujące parametry:
Ps — moc znamionowa, kW;
jjaS — napięcie znamionowe, V;
laN — prąd znamionowy silnika obcowzbudnego, A;
IK — prąd znamionowy silnika bocznikowego, A, przy czym ly —
Qs — prędkość znamionowa, rad/s;
dla nv wyrażonej w obr/min QN = nK/9,55.
Sprawność przy obciążeniu znamionowym wynika ze wzoru Py
= ,, ,
Rezystancja obwodu twornika przy założeniu równości strat stałych i zmiennych (poza wzbudzeniem) jest określona zależnością
(6.41)
R„ =
1-'1n
żj;,v t]N
Skojarzony rotacyjnie z uzwojeniem twornika strumień w warunkach znamionowych
%
(6.42)
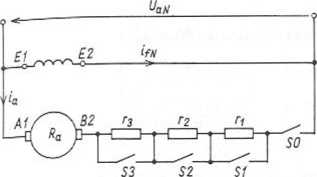
Rys. 6.16. Rozruch silnika bocznikowego: a) schemat; b) charakterystyki mechaniczne 50, SI, S2, 53 styczniki w obwodzie twornika
w —
r e.V —
Indukcyjność obwodu twornika udaje się ocenić z niewielką dokładnością. Według Schuisky’ego [6.6] można ją wyznaczyć w henrach z następujących wzorów:
— dla maszyn bez uzwojenia kompensacyjnego
La = 0,58 b“N IasP^y
— dla maszyn z uzwojeniem kompensacyjnym
La = 0,25
Hamowanie napędu z silnikiem bocznikowym lub obcowzbudnym jest stosowane w celu doprowadzenia jego prędkości do zera i wówczas jest nazywane hamowaniem kinetycznym. Gdy celem hamowania jest utrzymanie zadanej prędkości, np. przy opuszczaniu ciężaru w suwnicy, wówczas nosi ono nazwę hamowania potencjalnego. Na
Wyszukiwarka
Podobne podstrony:
2tom239 6. NAPĘD ELEKTRYCZNY 480 Rys. 6.17. Hamowanie silnikiem bocznikowym: a) charakterystyki: / —
2tom232 Napęd elektryczny prof. dr bab. inż. Kazimierz Bisztyga6.1. Równanie ruchu napędu Układ napę
Napęd elektryczny, sem. V Cechy silników elektrycznych z punktu widzenia zastosowania ich w układach
2tom233 6. NAPĘD ELEKTRYCZNY 468 W niektórych mechanizmach występuje zależność momentu obrotowego od
2tom234 6. NAPĘD ELEKTRYCZNY 470 Przykładowy przebieg rj = f(MJMs) pokazano na rys. 6.6. Nowoczesne
2tom235 6. NAPĘD ELEKTRYCZNY 472 a) c 25 Bu / V b) s 2u »e mĄ/ i A ■
2tom236 6. NAPĘD ELEKTRYCZNY 4742 At, Obliczenia takie najlepiej prowadzić na EMC, w której łatwo wp
2tom237 6. NAPĘD ELEKTRYCZNY 476 oraz z uwzględnieniem funkcji wartości początkowych O •
2tom246 6. NAPĘD ELEKTRYCZNY 494 Rys. 6.33. Oscylacyjny przebieg prędkości kątowej a — przy odciążen
2tom249 6. NAPĘD ELEKTRYCZNY 500 pod nabiegunnikiem — zwiększa się znacznie w przestrzeni międzybieg
2tom259 6. NAPĘD ELEKTRYCZNY6.5. Metody oraz układy regulacji i stabilizacji prędkości silników prąd
2tom261 6. NAPĘD ELEKTRYCZNY 524 prądu były odpowiednio „zorientowane” w stosunku do strumienia magn
2tom280 7. TRAKCJA ELEKTRYCZNA 562 nie Y(rys. 7.18). Podwieszenie drutów do linki w pobliżu zawiesze
ScanImage06 Napęd elektryczny Napęd elektryczny, jest to napędzanie maszyny roboczej, np. pompy za p
10863522?1563912878492a0197160 n Napęd elektryczny - zaliczenie . i. Silnik P£.(ćw
2tom242 6. NAPĘD ELEKTRYCZNY 486 6. NAPĘD ELEKTRYCZNY 486 Rys. 6.24. Charakterystyka silnika szerego
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
Napęd elektryczny, sem. V W przypadku, gdy moment dynamiczny Md (niezależnie od rodzaju silnika) jes
więcej podobnych podstron