2tom235
6. NAPĘD ELEKTRYCZNY 472
|
a) c 25 Bu |
/ V |
b) s 2u | |||
|
»e |
mĄ/ |
i |
A | ||
|
■ yr y |
«a |
r | |||
|
0 |
i n 3? i 3? |
M 0 |
tu t |
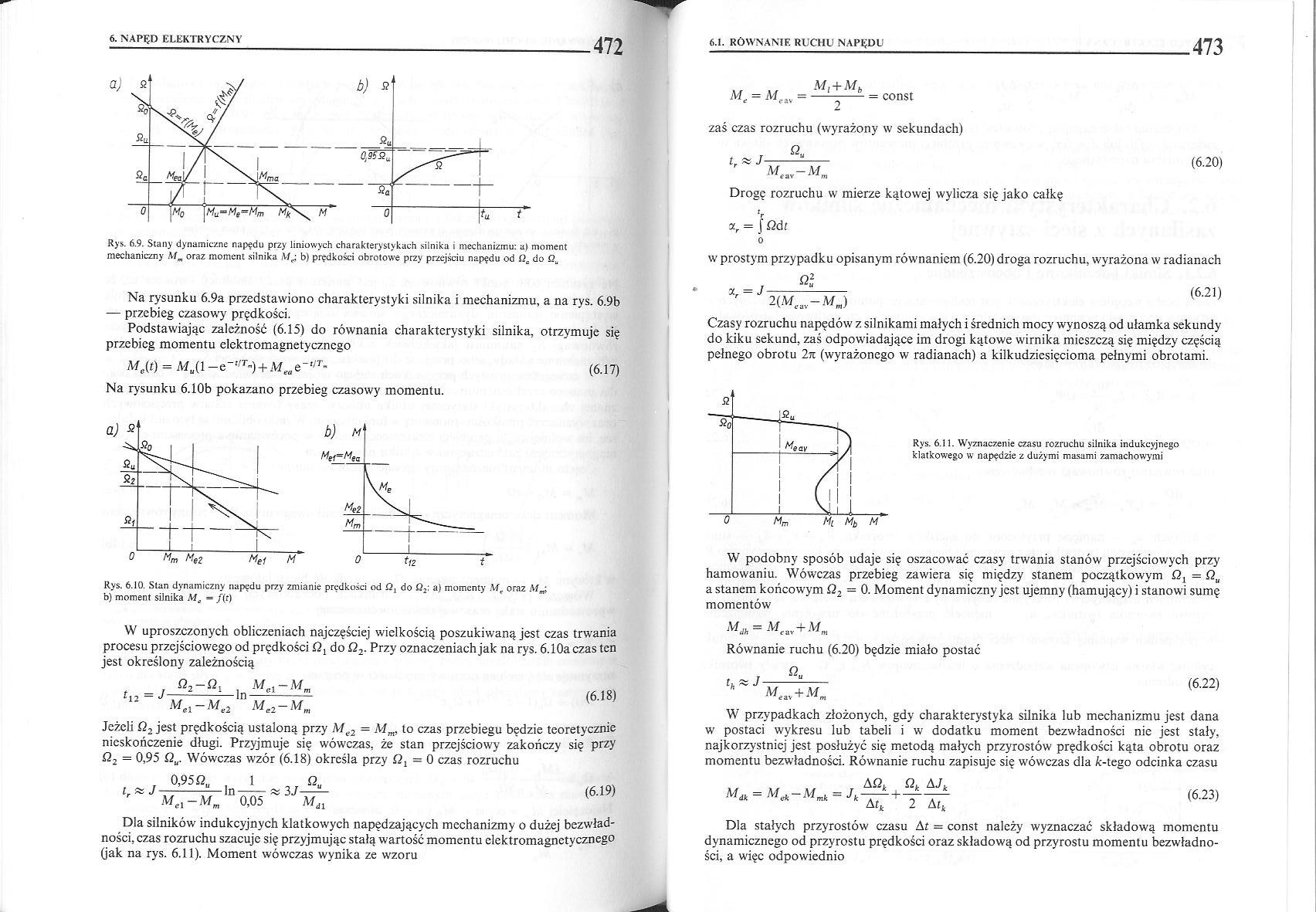
Rys. 6.9. Stany dynamiczne napędu przy liniowych charakterystykach silnika i mechanizmu: a) moment mechaniczny Mm oraz moment silnika b) prędkości obrotowe przy przejściu napędu od S2e do f?u
Na rysunku 6.9a przedstawiono charakterystyki silnika i mechanizmu, a na rys. 6.9b — przebieg czasowy prędkości.
Podstawiając zależność (6.15) do równania charakterystyki silnika, otrzymuje się przebieg momentu elektromagnetycznego
Me(t) = M,( 1 — e”'/r-) + Mea e_,/T- (6.17)
Na rysunku 6.10b pokazano przebieg czasowy momentu.
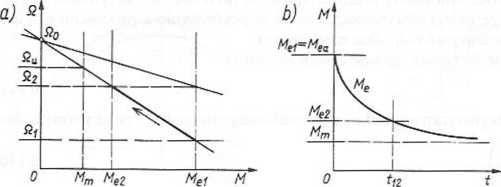
Rys. 6.10. Stan dynamiczny napędu przy zmianie prędkości od Qj do ft2: a) momenty Mr oraz b) moment silnika Me = /(r)
W uproszczonych obliczeniach najczęściej wielkością poszukiwaną jest czas trwania procesu przejściowego od prędkości Ql do Q2. Przy oznaczeniach jak na rys. 6.10a czas ten jest określony zależnością
tt2=J
m
ln-
■
(6.18)
Jeżeli Q2 jest prędkością ustaloną przy Me2 = Mm, to czas przebiegu będzie teoretycznie nieskończenie długi. Przyjmuje się wówczas, że stan przejściowy zakończy się przy Q2 = 0.95 Qu. Wówczas wzór (6.18) określa przy fJ, = 0 czas rozruchu
J
0,95 Qu 1
n 0,05
37-
(6.19)
Dla silników indukcyjnych klatkowych napędzających mechanizmy o dużej bezwładności, czas rozruchu szacuje się przyjmując stalą wartość momentu elektromagnetycznego (jak na rys. 6.11). Moment wówczas wynika ze wzoru
Qu
= const
M, = M.
M, + M„ 2
zaś czas rozruchu (wyrażony w sekundach)
Drogę rozruchu w mierze kątowej wylicza się jako całkę

w prostym przypadku opisanym równaniem (6.20) droga rozruchu, wyrażona w radianach
(6.21)
Czasy rozruchu napędów z silnikami małych i średnich mocy wynoszą od ułamka sekundy do kiku sekund, zaś odpowiadające im drogi kątowe wirnika mieszczą się między częścią pełnego obrotu 2n (wyrażonego w radianach) a kilkudziesięcioma pełnymi obrotami.
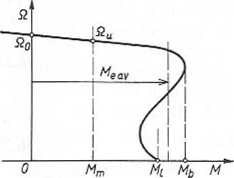
Rys. 6.11. Wyznaczenie czasu rozruchu silnika indukcyjnego klatkowego w napędzie z dużymi masami zamachowymi
W podobny sposób udaje się oszacować czasy trwania stanów przejściowych przy hamowaniu. Wówczas przebieg zawiera się między stanem początkowym = Qu a stanem końcowym Q2 = 0- Moment dynamiczny jest ujemny (hamujący) i stanowi sumę momentów
Równanie ruchu (6.20) będzie miało postać
(6.22)
Qu
lkJ---
Mm+Mm
W przypadkach złożonych, gdy charakterystyka silnika lub mechanizmu jest dana w postaci wykresu lub tabeli i w dodatku moment bezwładności nie jest stały, najkorzystniej jest posłużyć się metodą małych przyrostów prędkości kąta obrotu oraz momentu bezwładności. Równanie ruchu zapisuje się wówczas dla k-tego odcinka czasu
Mdk = Mek-Mmk = Jk-
A Jk 2 Ah
(6.23)
Dla stałych przyrostów czasu At = const należy wyznaczać składową momentu dynamicznego od przyrostu prędkości oraz składową od przyrostu momentu bezwładności, a więc odpowiednio
Wyszukiwarka
Podobne podstrony:
2tom232 Napęd elektryczny prof. dr bab. inż. Kazimierz Bisztyga6.1. Równanie ruchu napędu Układ napę
2tom233 6. NAPĘD ELEKTRYCZNY 468 W niektórych mechanizmach występuje zależność momentu obrotowego od
2tom234 6. NAPĘD ELEKTRYCZNY 470 Przykładowy przebieg rj = f(MJMs) pokazano na rys. 6.6. Nowoczesne
2tom236 6. NAPĘD ELEKTRYCZNY 4742 At, Obliczenia takie najlepiej prowadzić na EMC, w której łatwo wp
2tom237 6. NAPĘD ELEKTRYCZNY 476 oraz z uwzględnieniem funkcji wartości początkowych O •
2tom238 6. NAPĘD ELEKTRYCZNY 478 Odciążony silnik zwiększa swą prędkość do ok. Qorl = V<j}llxPeN,
2tom239 6. NAPĘD ELEKTRYCZNY 480 Rys. 6.17. Hamowanie silnikiem bocznikowym: a) charakterystyki: / —
2tom247 6. NAPĘD ELEKTRYCZNY 496 w granicach (0,25-0,5)/,,. * J* < Is < Ik * (8-=-10)/*. W sil
Strona 182 Wyposażenie elektryczne Rys. 7.25. Elementy poduszki powietrznej 1 — mo
NAPĘD ELEKTRYCZNY — wprawianie w „kontrolowany" ruch maszyn, urządzeń, konstrukcji
ScanImage06 Napęd elektryczny Napęd elektryczny, jest to napędzanie maszyny roboczej, np. pompy za p
P2/AIRPT/10. Napęd elektryczny i sterowanie przetworników elektromechanicznych-10h W, 10h L Cel: Głó
Sylabus Kod przedmiotu ES1A500038 Nazwa przedmiotu Napęd elektryczny Kierunek
4. Gogolewski Z., Kuczewski Z.: Napęd elektryczny. Warszawa WNT 1984 5.
Napęd elektryczny jako dziedzina systemowa należy do grupy przedmiotów_specjalizacyjnych_ Technika
XXI wiek... 6-kariera?Napęd elektryczny - dziedzina systemowa (kojarzona niegdyś tylko z maszynami
„Madę in ZNE”6 - kariera? Napęd elektryczny - dziedzina systemowa integruje zagadnienia: maszyn
więcej podobnych podstron