2tom233
6. NAPĘD ELEKTRYCZNY 468
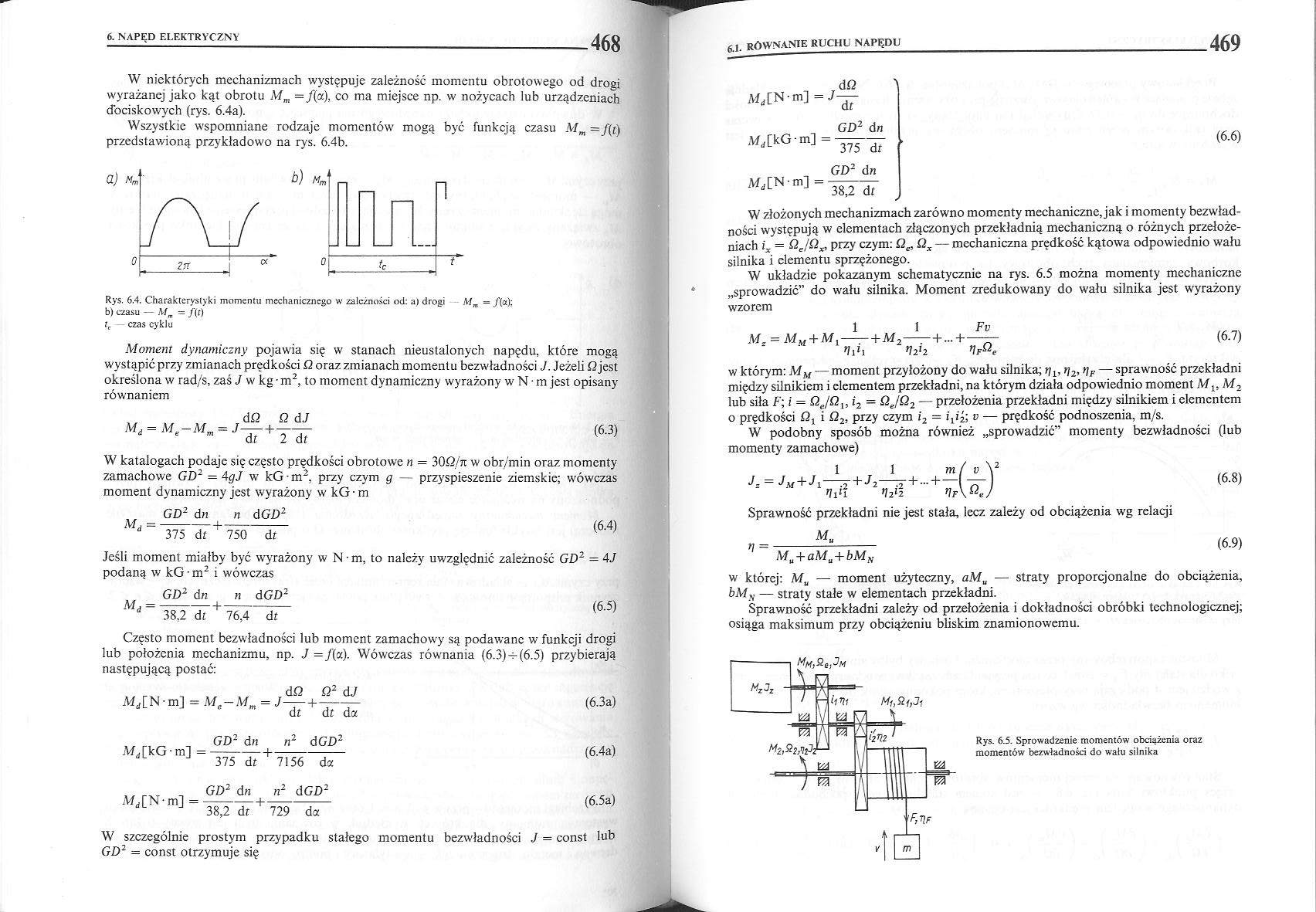
W niektórych mechanizmach występuje zależność momentu obrotowego od drogi wyrażanej jako kąt obrotu Mm =/(a), co ma miejsce np. w nożycach lub urządzeniach dociskowych (rys. 6.4a).
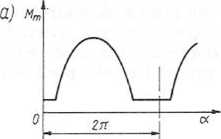
Wszystkie wspomniane rodzaje momentów mogą być funkcją czasu Mm =/(£) przedstawioną przykładowo na rys. 6.4b.
b) Mm
0
Rys. 6.4. Charakterystyki momentu mechanicznego w zależności od: a) drogi Mm = /(a); b) czasu — tV/m = /(r) ic czas cyklu
Moment dynamiczny pojawia się w stanach nieustalonych napędu, które mogą wystąpić przy zmianach prędkości Q oraz zmianach momentu bezwładności J. Jeżeli O jest określona w rad/s, zaś J w kg-m2, to moment dynamiczny wyrażony w' N • m jest opisany równaniem
Md = Me-Mm
d£2 Q dJ
.1-+--
d£ 2 dr
(6.3)
W katalogach podaje się często prędkości obrotowe n = 30£2/n w obr/min oraz momenty zamachowe GD2 = 4gj w kG • m2, przy czym g — przyspieszenie ziemskie; wówczas moment dynamiczny jest wyrażony w kG • m
GD2 du n dGD2 ~¥/T~dt + 750 dr
(6.4)
Jeśli moment miałby być wyrażony wN-m, to należy uwzględnić zależność GI>2 = 4J podaną w kG • m2 i wówczas
GD2 dn n dGD2
38,2 "di"+764 Jt
(6.5)
Często moment bezwładności lub moment zamachowy są podawane w funkcji drogi lub położenia mechanizmu, np. J =/(a). Wówczas równania (6.3) -t- (6.5) przybierają następującą postać:
MIkG-m] Mdi N-m] =
38,2 dr
W szczególnie prostym GD2 = const otrzymuje się
GD1 d n
|
d.Q Q2 dJ |
(6.3a) |
|
dr dr da | |
|
n n2 dGD2 |
(6.4a) |
|
t 7156 da | |
|
n2 dGD2 |
(6.5a) |
|
729 da | |
|
przypadku stałego momentu |
bezwładności J = const lub |
GD2 dn 375 dr" GD2 dn 38,2 17
(6.6)
Mj[N ■ m] =
W złożonych mechanizmach zarówno momenty mechaniczne,jak i momenty bezwładności występują w elementach złączonych przekładnią mechaniczną o różnych przełożeniach ix = Ć2JQx, przy czym: Qe, Qx — mechaniczna prędkość kątowa odpowiednio wału silnika i elementu sprzężonego.
W układzie pokazanym schematycznie na rys. 6.5 można momenty mechaniczne „sprowadzić” do wału silnika. Moment zredukowany do wału silnika jest wyrażony wzorem
(6.7)
Af^N-m]

1 1 Fv
A7„ = + M j--hA72--h — -I---~-
nih >1fqc
w którym: Mm — moment przyłożony do wału silnika; ąŁ, ?;2, t]r — sprawność przekładni między silnikiem i elementem przekładni, na którym działa odpowiednio moment Mv M2 lub siła F; i = QJ£lu i2 = OJQ2 — przełożenia przekładni między silnikiem i elementem o prędkości Qt i Q2, przy czym i2 = i, i2; v — prędkość podnoszenia, m/s.
W podobny sposób można również „sprowadzić” momenty bezwładności (lub momenty zamachowe)
1
— Jm~^~ ^FJ2
1 m
-Tf+ ... + —
12*2 >lF

Sprawność przekładni nie jest stała, lecz zależy od obciążenia wg relacji
(6.9)
Mu
Mu + aMa + bMK
w której: Mu — moment użyteczny, aMu — straty proporcjonalne do obciążenia, bMs — straty stałe w elementach przekładni.
Sprawność przekładni zależy od przełożenia i dokładności obróbki technologicznej; osiąga maksimum przy obciążeniu bliskim znamionowemu.
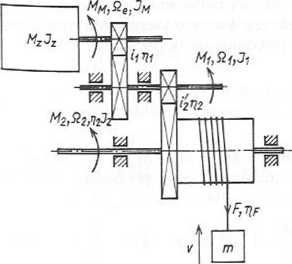
Rys. 6.5. Sprowadzenie momentów obciążenia oraz momentów' bezwładności do wału silnika
Wyszukiwarka
Podobne podstrony:
2tom232 Napęd elektryczny prof. dr bab. inż. Kazimierz Bisztyga6.1. Równanie ruchu napędu Układ napę
Napęd elektryczny, sem. V Charakterystyki mechaniczne silników elektrycznych Z punktu widzenia napęd
Napęd elektryczny, sem. V Przekładnia mechaniczna PM (połączenie mechaniczne) Możliwe są
2tom234 6. NAPĘD ELEKTRYCZNY 470 Przykładowy przebieg rj = f(MJMs) pokazano na rys. 6.6. Nowoczesne
2tom235 6. NAPĘD ELEKTRYCZNY 472 a) c 25 Bu / V b) s 2u »e mĄ/ i A ■
2tom236 6. NAPĘD ELEKTRYCZNY 4742 At, Obliczenia takie najlepiej prowadzić na EMC, w której łatwo wp
2tom237 6. NAPĘD ELEKTRYCZNY 476 oraz z uwzględnieniem funkcji wartości początkowych O •
2tom238 6. NAPĘD ELEKTRYCZNY 478 Odciążony silnik zwiększa swą prędkość do ok. Qorl = V<j}llxPeN,
2tom239 6. NAPĘD ELEKTRYCZNY 480 Rys. 6.17. Hamowanie silnikiem bocznikowym: a) charakterystyki: / —
17763 skanuj0400 Rys. 15.7. Hamulce cięgnowe: a) zwykły, b) różnicowy, c) sumowy występują większe m
5 Rys.3. Szkic sprzęgła ciernego jedno tarczowego Zależność momentu tarcia T, od jego parametrów
Sprzęgła główne (mechanizmy służące do momentu obrotowego z silnika do mechanizmów
DSC05014 Mechanizm jazdy wciągnika Napęd ręczny MJ Napęd elektryczny MJ
Napęd elektryczny, sem. V Typowe charakterystyki mechaniczne maszyn roboczych MR Moment w napędzie
Napęd elektryczny, sem. V Typowe charakterystyki mechaniczne maszyn roboczych MR Moment w napędzie
2tom248 6. NAPĘD ELEKTRYCZNY 498 Prąd w uzwojeniu wirnika wyznacza się z zależnościl/J &
więcej podobnych podstron