Astrofotografia (26)
Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne 29
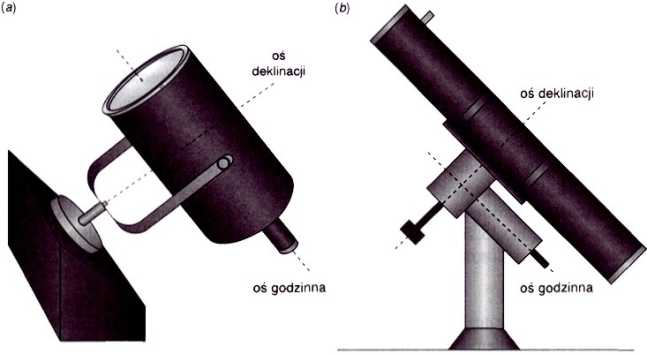
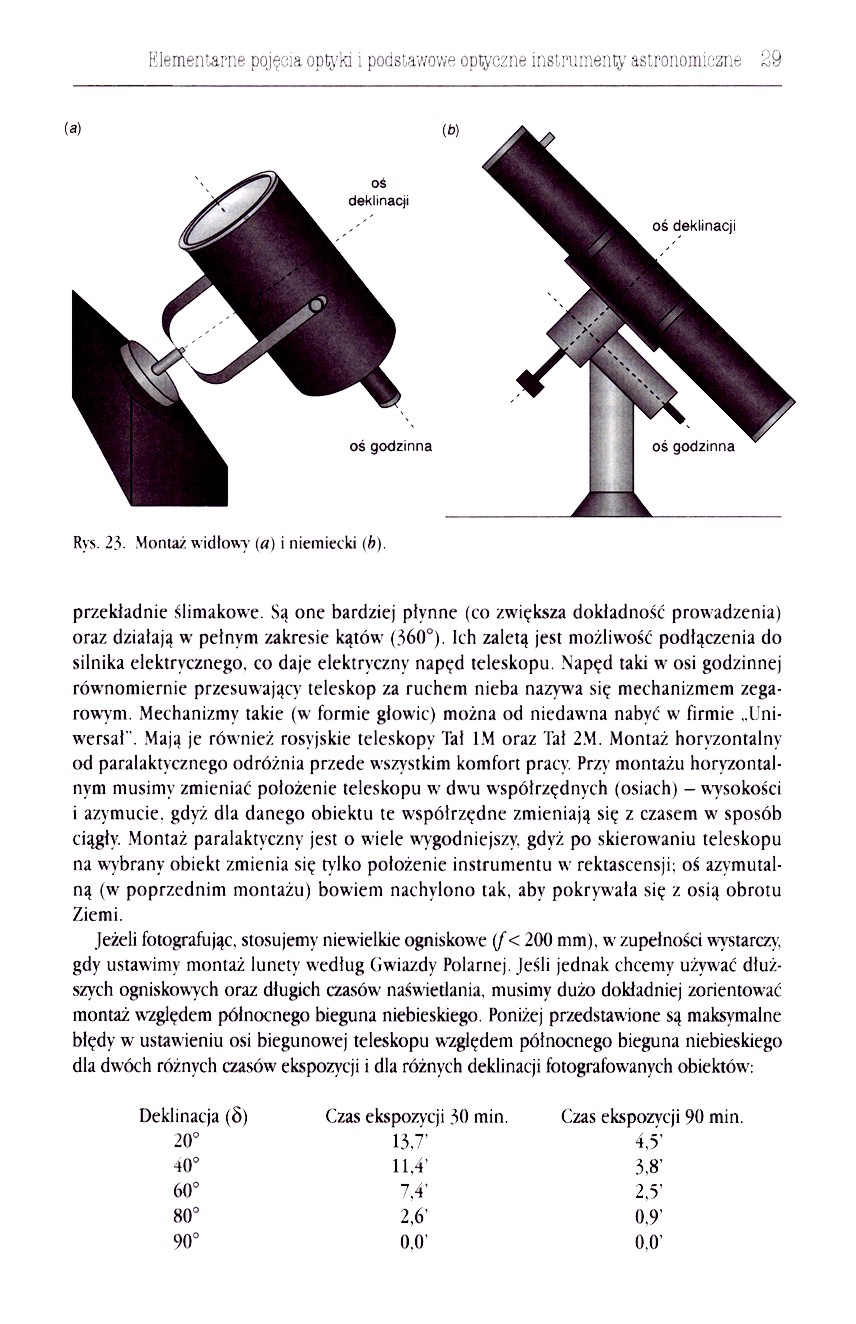
Rys. 23. Montaż widłowy (a) i niemiecki (/>).
przekładnie ślimakowe. Są one bardziej płynne (co zwiększa dokładność prowadzenia) oraz działają w pełnym zakresie kątów (360°). Ich zaletą jest możliwość podłączenia do silnika elektrycznego, co daje elektryczny napęd teleskopu. Napęd taki w osi godzinnej równomiernie przesuwający teleskop za ruchem nieba nazywa się mechanizmem zegarowym. Mechanizmy takie (w formie głowic) można od niedawna nabyć w firmie „Uniwersał". Mają je również rosyjskie teleskopy Tał IM oraz Tał 2M. Montaż horyzontalny od paralaktycznego odróżnia przede wszystkim komfort pracy. Przy montażu horyzontalnym musimy zmieniać położenie teleskopu w dwu współrzędnych (osiach) — wysokości i azymucie, gdyż dla danego obiektu te współrzędne zmieniają się z czasem w sposób ciągły. Montaż paralaktyczny jest o wiele wygodniejszy, gdyż po skierowaniu teleskopu na wybrany obiekt zmienia się tylko położenie instrumentu w rektascensji: oś azymutal-ną (w poprzednim montażu) bowiem nachylono tak, aby pokrywała się z osią obrotu Ziemi.
Jeżeli fotografując, stosujemy niewielkie ogniskowe (f < 200 mm), w-zupełności wystarcz)’, gdy ustawimy montaż lunety według Gwiazdy Polarnej. Jeśli jednak chcemy używać dłuższych ogniskowych oraz długich czasów naświedania. musimy dużo dokładniej zorientować montaż względem północnego bieguna niebieskiego. Poniżej przedstawione są maksymalne błędy w ustawieniu osi biegunowej teleskopu względem północnego bieguna niebieskiego dla dwóch różnych czasów ekspozycji i dla różnych dekłinaqi fotografowanych obiektów:
|
inacja (8) |
Czas ekspozycji 30 min. |
Czas ekspozycji 90 min. |
|
20° |
13.7’ |
4,5' |
|
40° |
11,4’ |
3.8’ |
|
60° |
7.4' |
2,5’ |
|
80° |
2.6’ |
0.9’ |
|
90° |
0.0' |
0.0' |
Wyszukiwarka
Podobne podstrony:
Astrofotografia (10) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne świa
Astrofotografia (12) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne lo g
Astrofotografia (16) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne 19 n
Astrofotografia (18) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronom; Jak wida
Astrofotografia (20) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne 23Te
Astrofotografia (22) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne
Astrofotografia (24) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne refl
Astrofotografia (28) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne 31 C
Astrofotografia (14) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne Poza
Astrofotografia (8) Elementarne pojęcia optyki i podstawowe optyczne instrumenty astronomiczne 11 Og
Astrofotografia (6) Rozdział 1 Dobre chęci to połowa sukcesu, druga potowa to sprzęt.Elementarne poj
Podstawy ekonomii. Elementarne pojęciaEkonomia i jej podstawowe pojęcia Ekonomia jest to nauka, któr
77320 MechanikaF2 6. Elementy mechaniki płynów 6.1. Podstawowe pojęcia • siły dzia
4. MATERIAŁ NAUCZANIA4.1. Zastosowanie elementów optycznych instrumentach
23 (160) hW4 Elementy teorii polaŁg Podstawowe pojęcia teorii pola Oznaczenia: : $R3 &nb
26 (662) 142 Administracja puhlic.na pojęcia i problemy podstawowe dowisk gospodarczych i zawodowych
img087 87 2.5.2. Teodolit 2.5.2.1. C2gścl składowe teodolitu Podstawowym współczesnym Instrumentom
więcej podobnych podstron