DSC00313 2
Sprawdzian z podstaw robotyki
Wyniki obliczeń należy wpisać do tabeli z dokładnością do trzech cyfr po przecinku.
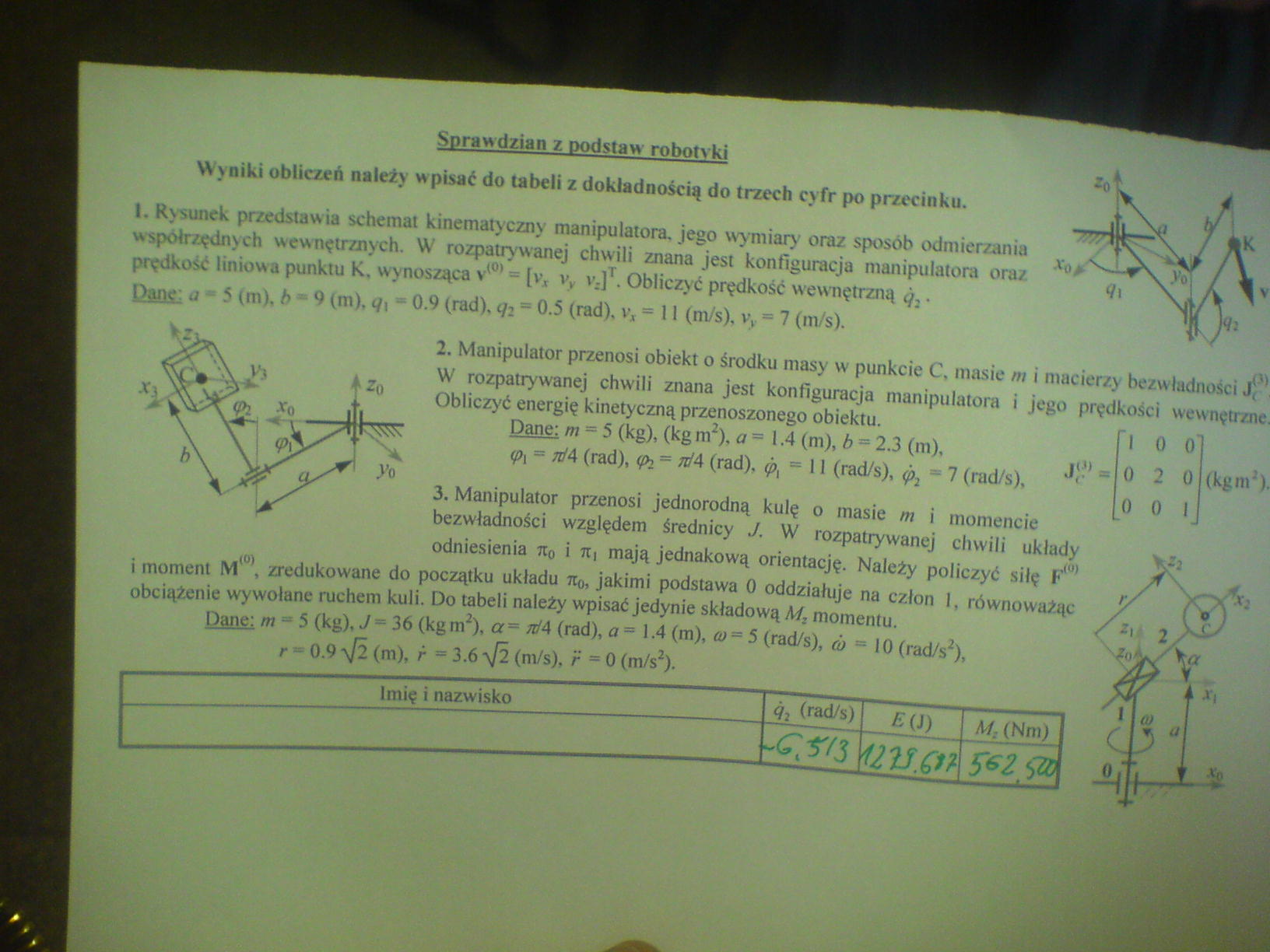
I. Rysunek przedstawia schemat kinematyczny manipulatora, jego wymiary oraz sposób odmierzania współrzędnych wewnętrznych. W rozpatrywanej chwili znana jest konfiguracja manipulatora oraz prędkość liniowa punktu K, wynosząca v(0> = [vx vv v.]T. Obliczyć prędkość wewnętrzną q7.
Dane; a * 5 (m), b ~ 9 (m), = 0.9 (rad), q2 = 0.5 (rad), v, = 11 (m/s), v, = 7 (m/s).
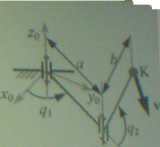
2. Manipulator przenosi obiekt o środku masy w punkcie C, masie m i macierzy bezwładności jf' W rozpatrywanej chwili znana jest konfiguracja manipulatora i jego prędkości wewnętrzne.
Obliczyć energię kinetyczną przenoszonego obiektu.
Dane: m - 5 (kg), (kg m2), a - 1.4 (m), b - 2.3 (m),
<Px = 7dA (rad), q>i~ idA (rad), 11 (rad/s), ^ - 7 (rad/s),
3. Manipulator przenosi jednorodną kulę o masie m i momencie bezwładności względem średnicy J. W rozpatrywanej chwili układy odniesienia Tio i fli mają jednakową orientację. Należy policzyć siłę F i moment M<0\ zredukowane do początku układu no, jakimi podstawa 0 oddziałuje na człon 1, równoważąc obciążenie wywołane ruchem kuli. Do tabeli należy wpisać jedynie składową Mf momentu.
Dane: «*J (kg), J - 36 (kgm2), a*= nlA (rad), a =* 1.4 (m), Q)~ 5 (rad/s), oj ~ 10 (rad/s2), r ** 0.9 yjl (m), r - 3.6 yjl (m/s), r = 0 (m/s2).
|
Imię i nazwisko |
q7 (rad/s) |
BO) |
M, (Nm) 1 |
|
.cyn |
5*2. «a| |
0 0 2 0 0 1
(kgm2).

Wyszukiwarka
Podobne podstrony:
Egzamin v1 > ,?0 j ,Za yo Egzamin z podstaw robotyki Wyniki obliczań należy wpisać il<i
Egzamin v2 Egzamin / podstaw robotyki Wyniki obliczeń należy wpisać do tabeli z dokładnością do trze
Kolokwium 2 v1 Sprawdzian 2 podała w roboty id Wyniki obliczeń należy wpisać do tabeli 1 dokładności
kolo 3 Sprawdzian z KM3 Wyniki obliczeń należy wpisać do tabelki z dokładnością do trzech cyfr po pr
DSC00926 Fiyamin / podstaw roholki Wyniki obliczeń należy wpisać do tabeli / dokładnością do trzech
Kolokwium 1 i 2 Zadania przykładowe Wyniki obliczeń należy wpisać do tabeli z dokładnością do trzech
skrypt101 (2) 196 Laboratorium Podstaw Elektrotechniki 1 Wyniki obliczeń i pomiarów notujemy w tabli
73780 współdziałanie Wyniki obliczeń współdziałania studzien przedstawiono w tabeli 4. Tabela 4. Ze
wykonywania ćwiczenia. 5.3. Wykonanie ćwiczenia Podczas ćwiczenia należy: = Wpisać do protokółu
II. ORGANIZACJA PRACY W LABORATORIUM, cd. 6. Wyniki pomiarów należy wpisywać do protokółu w formie t
Obrazek16 Rozwiąż równanie. Wynik wskaże Ci, którą literkę każdego wyrazu należy wpisać do kratek. a
77971 P1010275 (2) Szkolenie należy wpisać do indeksu na stronie PRAKTYK tj. strona 82 83 W kolumnie
więcej podobnych podstron