DSC00926

Fiyamin / podstaw rohol\ki
Wyniki obliczeń należy wpisać do tabeli / dokładnością do trzech cyfr po przecinku.
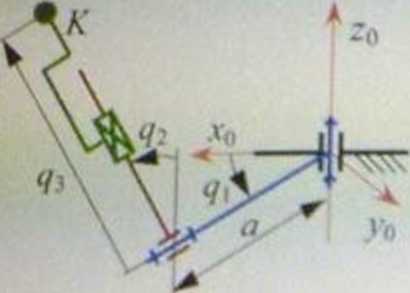
I. Rysunek przedstawia schemat kinematyczny manipulatora oraz sposób odmierzania współrzędnych wewnętrznych. Należy obliczyć współrzędną </j. znając położenie punktu K i wiedząc, że współrzędna q2 należy do przedziału <0, n>, a współrzędna q> przyjmuje wartości dodatnie.
Dane: a = 4 (dm), r* * = [-3 4
2.7 członami manipulatora o schemacie pokazanym na rysunku związano zgodnie z regułą Denavita-Hartenberga lokalne układy

Yo
układu 7t3 w układzie n0 w chwili, gdy zmienne parametry przyjmują wartości Q\ Dane: p (dm),
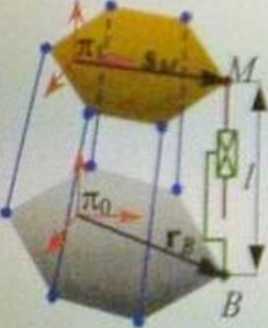
3>.7. platformą ruchomą manipulatora równoległego związany jest układ rc,, a z jego podstawą układ n(). W rozpatrywanej chwili usytuowanie układu 7ij względem ti0 opisane jest przez wektor ro’/ i macierz kosinusów kierunkowych R? = H (a). prędkość liniowa początku układu nt ma wartość v' \ a prędkość kątowa platformy ruchomej wynosi w". Należy obliczyć prędkość względną w pokazanej na rysunku napędzanej parze postępowej. Dane: r [14 5]r(dm),a arctg(3/4),r**® [5 6 0]r(dm),*[9 10 0]r(dm), v<0> * [0 I OJr(dm/s)t(0<o,-[l 0 0]r (rad/s).
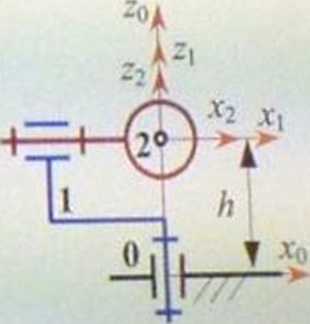
4. Manipulator przenosi jednorodną kulę o masie m i momencie bezwładności względem średnicy J. W rozpatrywanej chwili układy odniesienia 7t0, n\ i 7t2 mają jednakową orientację.
Należy policzyć siłę F i moment M zredukowane do początku układu 7i0, jakimi podstawa 0 oddziałuje na człon I, równoważąc obciążenie wywołane ruchem kuli. Do tabeli należy wpisać moduł momentu M Dane: /; = 4 (m) * 10 (kg nr), oą = I (rad/s), = I (rad/s ), oh = 4 (rad/s), = 0
.(0)
|
Imię i nazwisko |
q2 (rad) |
x (dm) |
/ (dm/s) |
M(Nm) |
Wyszukiwarka
Podobne podstrony:
Egzamin v1 > ,?0 j ,Za yo Egzamin z podstaw robotyki Wyniki obliczań należy wpisać il<i
Egzamin v2 Egzamin / podstaw robotyki Wyniki obliczeń należy wpisać do tabeli z dokładnością do trze
DSC00313 2 Sprawdzian z podstaw robotyki Wyniki obliczeń należy wpisać do tabeli z dokładnością do t
Kolokwium 1 i 2 Zadania przykładowe Wyniki obliczeń należy wpisać do tabeli z dokładnością do trzech
Kolokwium 2 v1 Sprawdzian 2 podała w roboty id Wyniki obliczeń należy wpisać do tabeli 1 dokładności
kolo 3 Sprawdzian z KM3 Wyniki obliczeń należy wpisać do tabelki z dokładnością do trzech cyfr po pr
73780 współdziałanie Wyniki obliczeń współdziałania studzien przedstawiono w tabeli 4. Tabela 4. Ze
II. ORGANIZACJA PRACY W LABORATORIUM, cd. 6. Wyniki pomiarów należy wpisywać do protokółu w formie t
Slajd25 Obliczenia należy kontynuować do głębokości, na której jest spełniony warunek: Jednak gdy wy
IMG@23 • Skargę konstytucyjną należy złożyć do Trybunału Konstytucyjnego, po wyczerpaniu drogi
wykonywania ćwiczenia. 5.3. Wykonanie ćwiczenia Podczas ćwiczenia należy: = Wpisać do protokółu
Obrazek16 Rozwiąż równanie. Wynik wskaże Ci, którą literkę każdego wyrazu należy wpisać do kratek. a
więcej podobnych podstron