Egzamin v1


|
> ,?0 j |
,Za |
|
yo |
Egzamin z podstaw robotyki
Wyniki obliczań należy wpisać il<i tabeli z dokładnością d« trzech cyfr po przecinku,
1. Rysunek przedstawia schemat kinematyczny manipulatora oraz sposób odmierzaaia współrzędnych wewnętrznych. Należy obliczyć współrzędną x punktu K. w układzie nQ.
Dane: £7 = 3 (dm), b~A (dm), c = 5 (dm),q3 = 0.6(rad),q1 “0.8(rad), q? ~ 1.6(rad).
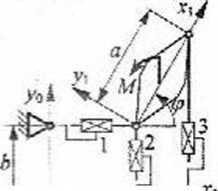
2. Z platformą ruchomą płaskiego manipulatora równoległego związany jest układ :t|, a z jego podstawą układ W rozpatrywanej chwili usytuowanie układu względem opisane jest przez wektor rS? = [a ó]T i kąt obrotu względnego <p. Platforma jest obciążona momentem sił zewnętrznych M. Należy obliczyć wartości sił napędowych równoważących przyłożony moment, do tabeli wpisując jedynie siłę w parze postępowej numer 2.
Dane: a = 6 (m), 6 = 4 (m), cm 9 (m), a/3 (rad), M ' 7rt (N rn).
77tr
i o a 0 2 0 o o i
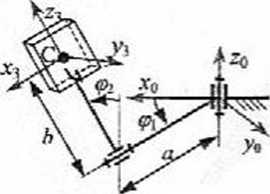
3. Manipulator przenosi obiekt o środku masy w punkcie C, masie m i macierzy bezwładności W rozpatrywanej chwili znana jest konfiguracja manipulatora i jego prędkości wewnętrzne. Wyznaczyć kręt przenoszonego obiektu w układzie Do tabeli wpisać moduł krętu.
(kgm1).
Dane: m 3 (kg), u - 0.7 (rn), b * 1.1 (m),
<Pi = uf A (rad), <p> = 7ĆA (rad), <pt =6 (rad/s), = 5 (rad/s),
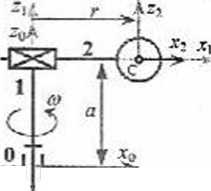
4. Manipulator przenosi jednorodną kulę o masie m i momencie bezwładności względem średnicy J. W rozpatrywanej chwili układy odniesienia iro, i a3 mają jednakową orientację. Należy policzyć silę F*0) i moment M(Cł, zredukowane do początku układu *©, jakimi podstawa 0 oddziałuje na człon 1, równoważąc obciążenie wywołane ruchem kuli (grawitację pominąć). Do tabeli należy' wpisać moduł momentu.
Dane: m - 3 (kg), J= 16 (kgm2), a = 0.7 (rn), co~2 (rad/s), (o * 6 (rod/s2),
r 0.4 (rn), r = 0 (m/s), r - 2 (m/s ).
|
Imię i nazwisko |
x (dm) |
^(N) |
*(kgm2/s) \ M(Sm) |
|
6.o&2 |
i3-?n |
•zzJ&Ątt. cer |
Wyszukiwarka
Podobne podstrony:
Egzamin v2 Egzamin / podstaw robotyki Wyniki obliczeń należy wpisać do tabeli z dokładnością do trze
DSC00313 2 Sprawdzian z podstaw robotyki Wyniki obliczeń należy wpisać do tabeli z dokładnością do t
Kolokwium 2 v1 Sprawdzian 2 podała w roboty id Wyniki obliczeń należy wpisać do tabeli 1 dokładności
DSC00926 Fiyamin / podstaw roholki Wyniki obliczeń należy wpisać do tabeli / dokładnością do trzech
Kolokwium 1 i 2 Zadania przykładowe Wyniki obliczeń należy wpisać do tabeli z dokładnością do trzech
kolo 3 Sprawdzian z KM3 Wyniki obliczeń należy wpisać do tabelki z dokładnością do trzech cyfr po pr
EGZAMIN PODSTAWY ROBOTYKI 2 - 2010 1. Podać definicje modelu dynamiki różniczkowego oraz całkowego w
skrypt101 (2) 196 Laboratorium Podstaw Elektrotechniki 1 Wyniki obliczeń i pomiarów notujemy w tabli
73780 współdziałanie Wyniki obliczeń współdziałania studzien przedstawiono w tabeli 4. Tabela 4. Ze
egzamina Matematyka MAP 1058. Egzamin podstawowy. Grupa A. Za każde z zadań można otrzymać od 0 do 5
egzaminb Matematyka MAP 1058. Egzamin podstawowy. Grupa B. Za każde z zadań można otrzymać od 0 do 5
ituralnego 2015 10 Sprawozdanie z egzamii4. Podstawowe dane statystyczne Wyniki zdających 0 4 8 12 1
Wstęp do Robotyki (Zakres materiału na egzamin) 1. Podstawowe pojęcia z dziedziny
2. Podstawą obliczenia ostatecznego wyniku studiów kończących się egzaminem dyplomowym są wynik
Wstęp do Robotyki (Zakres materiału na egzamin) 1. Podstawowe pojęcia z dziedziny
Politechnika Wrocławska Wskaźniki rekrutacyjne a wyniki egzaminów z podstawowych
więcej podobnych podstron