Kolokwium 1 i 2
Zadania przykładowe
Wyniki obliczeń należy wpisać do tabeli z dokładnością do trzech cyfr po przecinku.
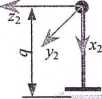
1. Człon o kształcie prostopadłościanu tworzy z podstawą parę sferyczną. Człon ustawiono tak, że krawędzie prostopadłościanu były równoległe do osi związanego z podstawą układu odniesienia 7i0 o początku w środku pary sferycznej. Następnie dokonano obrotu o kąt a wokół osi x, a potem o kąt P wokół osi y układu 7i0. Obliczyć wektor wodzący wierzchołka P w układzie 7t0. Do tabeli wpisać jedynie współrzędną z tego wektora. Dane: k = 1 (cm), l = 2 (cm), m = 4 (cm), a= 5 (deg), /?= 20 (deg).
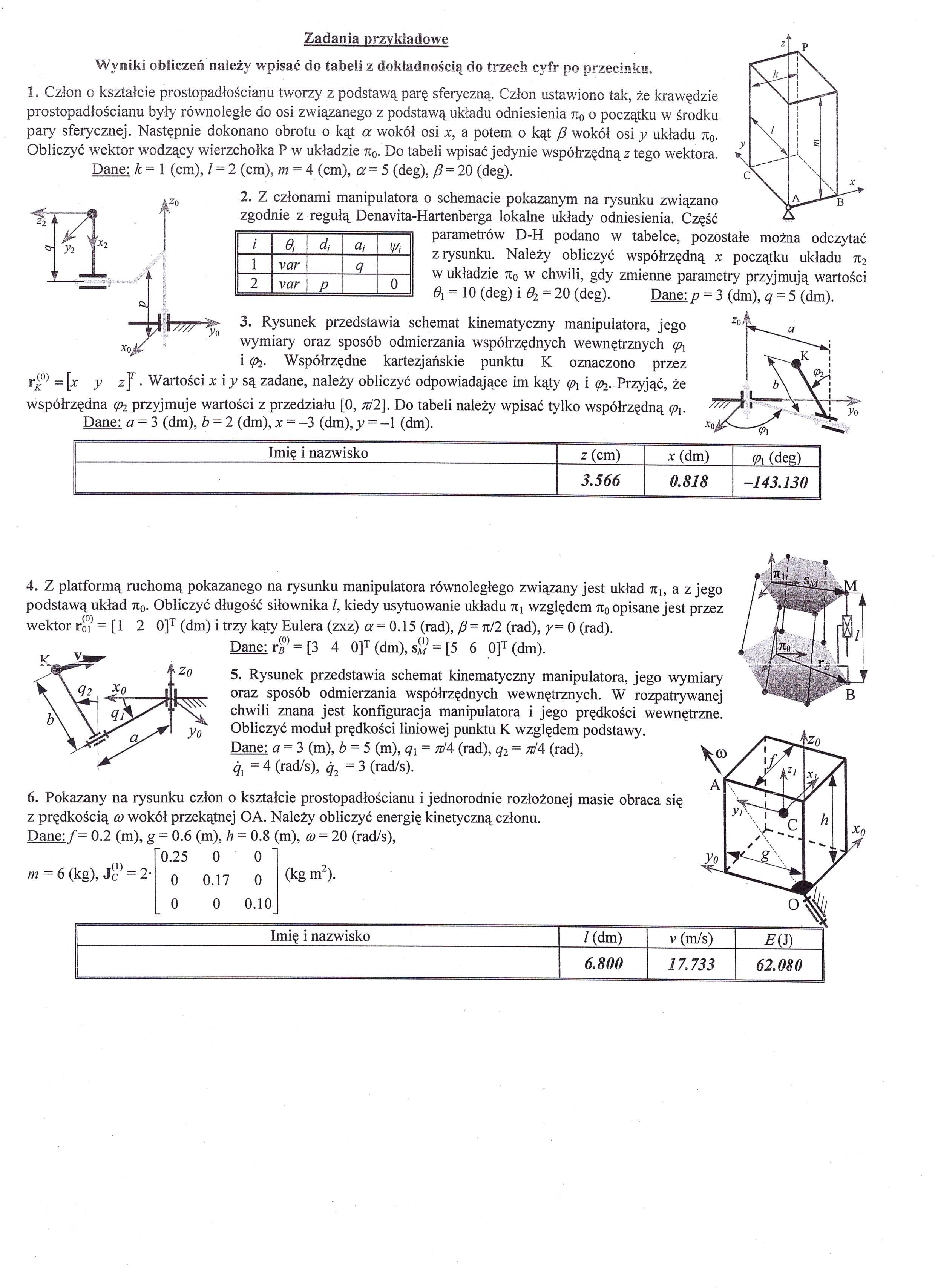
Zo 2. Z członami manipulatora o schemacie pokazanym na rysunku związano
zgodnie z regułą Denavita-Hartenberga lokalne układy odniesienia. Część
parametrów D-H podano w tabelce, pozostałe
|
i |
e, |
di |
ai | |
|
i |
var |
ą | ||
|
2 |
var |
P |
0 |
można odczytać
z rysunku. Należy obliczyć współrzędną * początku układu n2 w układzie jt0 w chwili, gdy zmienne parametry przyjmują wartości 0\ = 10 (deg) i 02 = 20 (deg). Dane:p = 3 (dm), q =5 (dm).
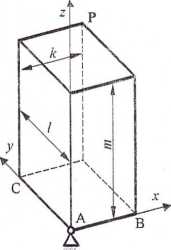
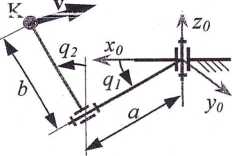
S/zy Rysunek przedstawia schemat kinematyczny manipulatora, jego
' wymiary oraz sposób odmierzania współrzędnych wewnętrznych q>\ i qh- Współrzędne kartezjańskie punktu K oznaczono przez ,= \x y zj ■ Wartości x iy są zadane, należy obliczyć odpowiadające im kąty <pi i ^. Przyjąć, że
współrzędna qh przyjmuje wartości z przedziału [0, zr/2 j. Do tabeli należy wpisać tylko współrzędną Dane: a = 3 (dm), b = 2 (dm), x = -3 (dm), y = -1 (dm).
|
Imię i nazwisko |
z (cm) |
x (dm) |
<P\ (deg) |
|
3.566 |
0.818 |
-143.130 |
4. Z platformą ruchomą pokazanego na rysunku manipulatora równoległego związany jest układ 7rb a z jego podstawą układ 7t0. Obliczyć długość siłownika /, kiedy usytuowanie układu 7ti względem 7t0 opisane jest przez 2 0]T (dm) i trzy kąty Eulera (zxz) a = 0.15 (rad), /? = rc/2 (rad), y= 0 (rad).
Dane: rf = [3 4 0]T (dm), sil? = [5 6 0]T (dm).
5. Rysunek przedstawia schemat kinematyczny manipulatora, jego wymiary oraz sposób odmierzania współrzędnych wewnętrznych. W rozpatrywanej chwili znana jest konfiguracja manipulatora i jego prędkości wewnętrzne. Obliczyć moduł prędkości liniowej punktu K względem podstawy.
Dane: a = 3 (m), b = 5 (m), q, = ntA (rad), q2 = nlA (rad), qx= A (rad/s), q2 = 3 (rad/s).
6. Pokazany na rysunku człon o kształcie prostopadłościanu i jednorodnie rozłożonej masie obraca się z prędkością co wokół przekątnej OA. Należy obliczyć energię kinetyczną członu.
: 20 (rad/s),
wektor ro? = [1
«=6(kg),J<c> =
|
= 0.6 |
(m), h |
= 0.8 |
|
'0.25 |
0 |
0 |
|
0 |
0.17 |
0 |
|
0 |
0 |
0.10 |
(kg nr).

|
Imię i nazwisko |
/(dm) |
v (m/s) |
BO) |
|
6.800 |
17.733 |
62.080 |
Wyszukiwarka
Podobne podstrony:
Kolokwium 2 v1 Sprawdzian 2 podała w roboty id Wyniki obliczeń należy wpisać do tabeli 1 dokładności
Egzamin v2 Egzamin / podstaw robotyki Wyniki obliczeń należy wpisać do tabeli z dokładnością do trze
kolo 3 Sprawdzian z KM3 Wyniki obliczeń należy wpisać do tabelki z dokładnością do trzech cyfr po pr
DSC00313 2 Sprawdzian z podstaw robotyki Wyniki obliczeń należy wpisać do tabeli z dokładnością do t
DSC00926 Fiyamin / podstaw roholki Wyniki obliczeń należy wpisać do tabeli / dokładnością do trzech
Egzamin v1 > ,?0 j ,Za yo Egzamin z podstaw robotyki Wyniki obliczań należy wpisać il<i
CCF20111107�000 45 Zadania Przykład 10. Obliczyć skład gazu generatorowego półwodnego, jeżeli do gen
skanuj0006 Zadanie 13. Których nożyczek należy użyć do efilowania włosów techniką ślizgową? A.
wykonywania ćwiczenia. 5.3. Wykonanie ćwiczenia Podczas ćwiczenia należy: = Wpisać do protokółu
DSC00207 (3) Zadania przygotowawcze: 1. W jaki sposób należy włączyć do obwodu amp
II. ORGANIZACJA PRACY W LABORATORIUM, cd. 6. Wyniki pomiarów należy wpisywać do protokółu w formie t
więcej podobnych podstron