Egzamin v2


Egzamin / podstaw robotyki
Wyniki obliczeń należy wpisać do tabeli z dokładnością do trzech cyfr po przecinku.
l. Kysimek przedstawia schemat kinematyczny manipulatora oraz sposób odmierzania współrzędnych wewnętrznych. Należy obliczyć współrzędną qh znając położenie punktu K i wiedząc, źe współrzędna <7? należy do przedziału <0, 7i>, a współrzędna q:. przyjmuje wartości dodamie.
(0>
Dane: <?” 8 (dm). rJT = H2 8 161T(dm).
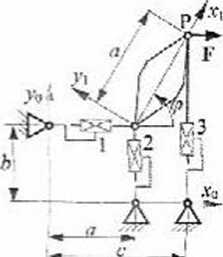
2. Z platformą ruchomą płaskiego manipulatora równoległego związany jest układ r.,, a z jego podstawa układ 7in. W rozpatrywanej chwili usytuowanie układu Kj względem a0 opisane jest przez wektor rć? = [a ÓJT i kąt obrotu względnego <p. Platforma jest obciążona zewnętrzną siłą FS| = [/■' 0JT o linii działania przechodzącej przez punkt P. Należy obliczyć wartości sił napędowy ch równoważących przyłożony moment, do tabeli wpisując jedynie silę w parze postępowej numer 1.
Dane: a = 8 (m), h = 8 (m), c » 12 (m), <p= ,*3 (rad), F" 120 (N).
3. Z członami manipulatora o schemacie pokazanymi na rysunku związano zgodnie z regułą Denavita-Hartcnberga lokalne układy odniesienia. Cześć
parametrów D-H podano w tabelce,
pozostałe można odczytać z rysunku. Należy' obliczyć współrzędną x początku układu u* w układzie rto w chwili, gdy zmienne parametry przyjmują wartości 0, = 0.4 (rad) i & 0.8 (nul).
Dane: p = )7 (dm), q - 3f> (dm).

|
' 4 |
d, |
« |
v, j | |
|
1 |
var |
-q |
1 | |
|
2 |
var |
0 |
rt2 1 |
4. Manipulator o dwóch parach obrotowych przenosi jednorodną kule o masie m i momencie bezwładności względem średnicy J. W rozpatrywanej chwili układy jt0, i k2 mają jednakową orientację. Należy' policzyć silę F°' i moment Msl, zredukowane do początku układu jakimi podstawa 0 działa na człon \, rówoawatag, wąrwołaiui Q<n kakeJA wtf&aŁ uwncŁoA
Dąnę: a = 4 (m). b = 8 (m), = 8 (kg), J = 32 (kg m2),
ft*i\ = 4 (rad's), m,- - 8 (rad/s), iyu| =4 (rad/s2), ty,, = U (rad/s2).

0 .vc
|
Imię i nazwisko |
<7i (rad) |
r 2 (Kł j x (dm) |
M (N m) |
|
~J, ?4 7 |
-JO?*?óC | 0- a°o |
33-04. Sfc |
Wyszukiwarka
Podobne podstrony:
Egzamin v1 > ,?0 j ,Za yo Egzamin z podstaw robotyki Wyniki obliczań należy wpisać il<i
DSC00313 2 Sprawdzian z podstaw robotyki Wyniki obliczeń należy wpisać do tabeli z dokładnością do t
Kolokwium 2 v1 Sprawdzian 2 podała w roboty id Wyniki obliczeń należy wpisać do tabeli 1 dokładności
DSC00926 Fiyamin / podstaw roholki Wyniki obliczeń należy wpisać do tabeli / dokładnością do trzech
Kolokwium 1 i 2 Zadania przykładowe Wyniki obliczeń należy wpisać do tabeli z dokładnością do trzech
kolo 3 Sprawdzian z KM3 Wyniki obliczeń należy wpisać do tabelki z dokładnością do trzech cyfr po pr
EGZAMIN PODSTAWY ROBOTYKI 2 - 2010 1. Podać definicje modelu dynamiki różniczkowego oraz całkowego w
skrypt101 (2) 196 Laboratorium Podstaw Elektrotechniki 1 Wyniki obliczeń i pomiarów notujemy w tabli
73780 współdziałanie Wyniki obliczeń współdziałania studzien przedstawiono w tabeli 4. Tabela 4. Ze
II. ORGANIZACJA PRACY W LABORATORIUM, cd. 6. Wyniki pomiarów należy wpisywać do protokółu w formie t
Slajd25 Obliczenia należy kontynuować do głębokości, na której jest spełniony warunek: Jednak gdy wy
IMG@23 • Skargę konstytucyjną należy złożyć do Trybunału Konstytucyjnego, po wyczerpaniu drogi
wykonywania ćwiczenia. 5.3. Wykonanie ćwiczenia Podczas ćwiczenia należy: = Wpisać do protokółu
więcej podobnych podstron