Image 157
160
końcami zależy od parametrów geometiycznych łańcucha kinematycznego robota i rodzaju napędów; jest to algorytm sterowania ruchem charakterystyczny dla układów nickomputerowych (sekwencyjnych) oraz komputerowych klasy NC. Dodatkowo, układy NC mają możliwość realizowania interpolowanych1* ruchów (np. interpolacja liniowa, tj. "po prostej", w ograniczonym przedziale współrzędnych, np. tylko na odcinku o długości max. 100 mm [3], bez możliwości jego pełnego "wygładzenia"). Ten typ algorytmu sterowania ruchem nazywamy również sterowaniem punktowym. Możliwość zaprogramowania w jednej instrukcji kilku pozycji referencyjnych tworzących jedną trajektorię ruchu robota posiadają tzw. układy sterowania wielopunktowego MP (ang. Multi Point). Pozycje referencyjne leżące pomiędzy pozycją startu a pozycją końca trajektorii nadające jej bardziej złożony kształt (niezbędny np. przy omijaniu przeszkód) noszą nazwę pozycji podporowych trajektorii.
160
Hobot
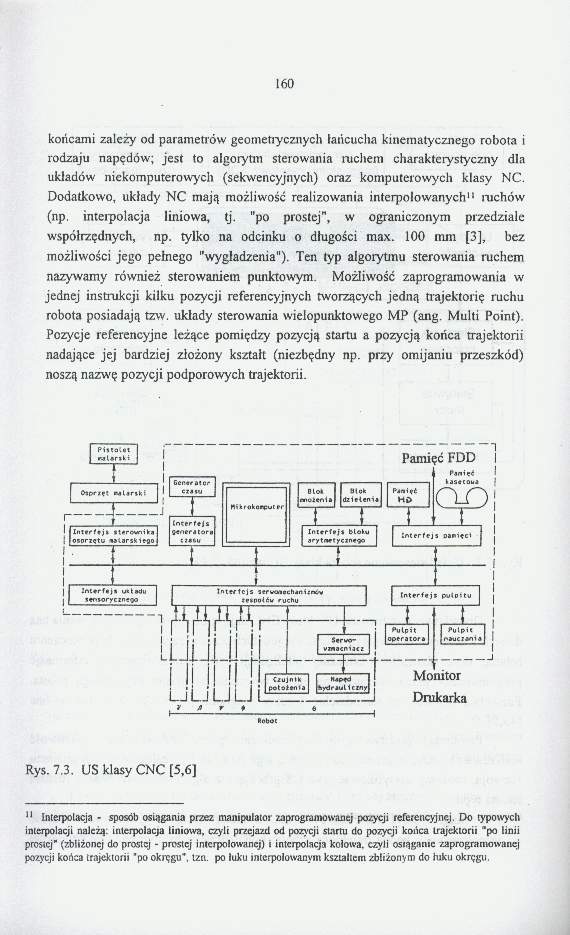
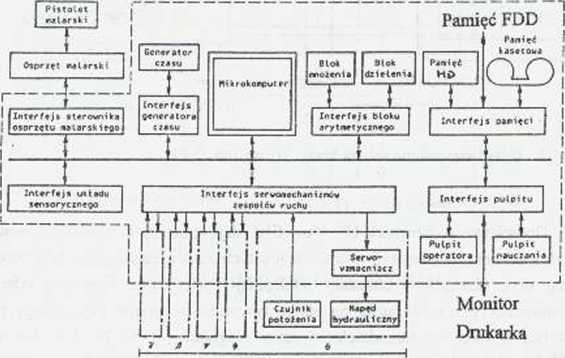
Rys. 7.3. US klasy CNC [5,6J 11 Interpolacja - sposób osiągania przez manipulator zaprogramowanej pozycji referencyjnej. Do typowych interpolacji należą: interpolacja liniowa, czyli przejazd od pozycji startu do pozycji końca trajektorii 'po linii prostej" (zbliżonej do prostej - prostej interpolowanej) i interpolacja kołowa, czyli osiąganie zaprogramowanej pozycji końca trajektorii 'po okręgu", izn. po luku interpolowanym kształtem zbliżonym do luku okręgu.
Wyszukiwarka
Podobne podstrony:
Slajd79 2 WIERCENIA RĘCZNE Efektywność wiercenia sposobem udarowym zależy od: - Pa
( Prawidłowo zaprojektowany cyklon zależy od parametrów konstrukcyjnych i własności odpylanego
Laboratorium Podstawy Programowania Aby określić rozmiar poszczególnych typów (zależy od parametrów
22846 Wykład 6 (31) ODDZIAŁYWANIE ŚWIATŁA LASEROWEGO NA TKANKĘ ZALEŻY OD; PARAMETRÓW ŚWIATŁA LASERA
27386 skanuj0341 Wybór najbardziej odpowiedniego materiału zależy od parametrów i konstrukcji przekł
569 § 1. Teoria elementarna Całka z prawej strony zależy od parametru k. Czeka nas dowód tego, że pr
ność pomiaru nie zależy od parametrów źródła prądowego. Istotne wymagania dotyczą jedynie rezystora
DSCN1539 ♦i +2 *1 , i A 4 llllllinTf zależy od parametrów związanych z człowieki
Porównanie DNA roś i zwierz (3) współczynnika ekstynkcji zależy od składu zasad azotowych w DNA. St
Część IIŻycie od środka zależy od długości trwania impulsu: jeżeli czas trwania impulsu jest zbyt dł
626 XIV. Całki zależne od parametru Dalsze różniczkowanie względem P pod znakiem całki jest
642 XIV. Całki zależne od parametru 528. Całkowanie pod znakiem całki. Prawdziwe jest tutaj twierdze
Image 06 11 Mechanizm robota - to łańcuch kinematyczny robota mający jeden człon nieruchomy; tzw. os
więcej podobnych podstron