Image 73
77
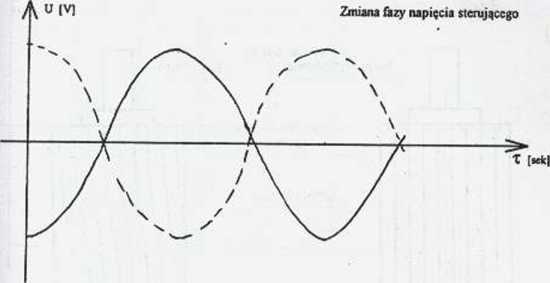
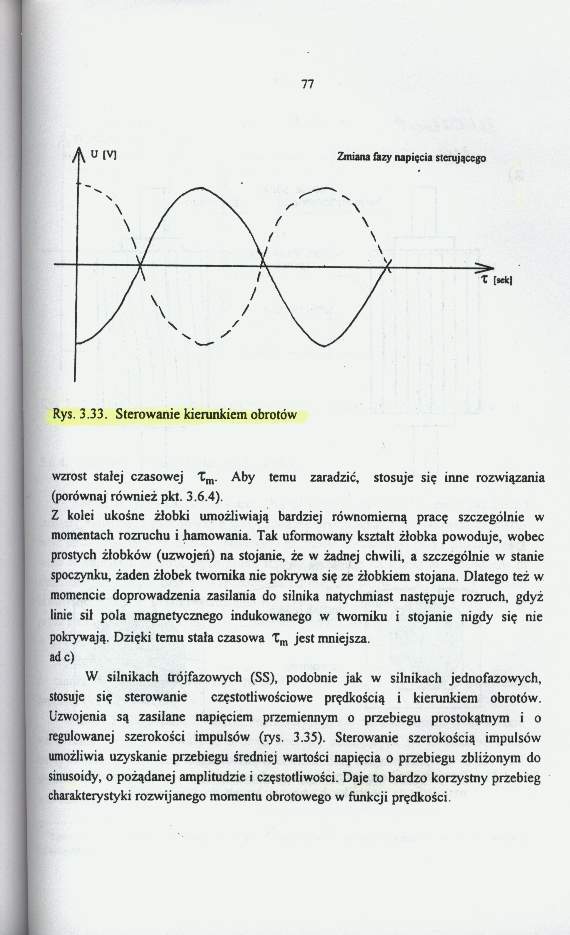
Rys. 3.33. Sterowanie kierunkiem obrotów
wzrost stałej czasowej Tm. Aby temu zaradzić, stosuje się inne rozwiązania (porównaj również pkt. 3.6.4).
Z kolei ukośne żłobki umożliwiają bardziej równomierną pracę szczególnie w momentach rozruchu i hamowania. Tak uformowany kształt żłobka powoduje, wobec prostych żłobków (uzwojeń) na stojanie, że w żadnej chwili, a szczególnie w stanie spoczynku, żaden żłobek twomika nie pokrywa się ze żłobkiem stojana. Dlatego też w momencie doprowadzenia zasilania do silnika natychmiast następuje rozruch, gdyż linie sił pola magnetycznego indukowanego w twomiku i stojanie nigdy się nie pokrywają. Dzięki temu stała czasowa Tm jest mniejsza, adc)
W silnikach trójfazowych (SS), podobnie jak w silnikach jednofazowych, stosuje się sterowanie częstotliwościowe prędkością i kierunkiem obrotów. Uzwojenia są zasilane napięciem przemiennym o przebiegu prostokątnym i o regulowanej szerokości impulsów (rys. 3.35). Sterowanie szerokością impulsów umożliwia uzyskanie przebiegu średniej wartości napięcia o przebiegu zbliżonym do sinusoidy, o pożądanej amplitudzie i częstotliwości. Daje to bardzo korzystny przebieg charakterystyki rozwijanego momentu obrotowego w funkcji prędkości
Wyszukiwarka
Podobne podstrony:
SNC00389 Rys. Stycznikowy przełącznik kierunku obrotów silnika,
DSCN0433 (Large) Rys. 2.3. Schemat blokowy impulsowego (PWM) sterownika silnika elektrycznego samej
18621 IMG398 Rys. 8J. Schemat studni chłonnej poprzedzonej osadnikiem SL&4 Osadnik pode ryni-jaj
image 017 Charakterystyka, promieniowania 17 Rys. 1.5. Przykładowa charakterystyka kierunkowa promie
OMiUP t2 Gorski)8 Rys. 7.38. Hydrauliczne maszyny sterowe z siłownikami obrotowymi: a) z siłownikiem
skanuj0076 2 Pomiary twardości 77 Rys. 5.17. Układ lampek kontrolnych sterowania siłą w aparacie Mik
73 (13) Rys. 100. Obrotowa rampa rufowa [27J: a) widok z góry: b) widok od strony rufy na zamkniętą
79 (43) 53HB - przekaźnik pneumatyczny sterowany hydraulicznie przez czujnik kontroli zgodności kier
Strona0073 73 Rozwiązanie zależności (2.178) pokazano na rys. 2.33. Drgania ustalają się bez dudnien
81379 S6302527 Rys. 9.1. Rysunek ofertowy tokerki rewolwerowej pionowej RV 32 1 - łoże, 2 - skrzynka
Rys. 2. Schemat sterowania silnika stycznikowym przełącznikiem kierunku wirowania [2] Bs - wyłącznik
Image 155 158 Rys. 7.1. Budowa sekwencyjnego układu sterowania robota [11J (monitor ot/N/graficzny -
więcej podobnych podstron