mechanika92
Rozwiązanie
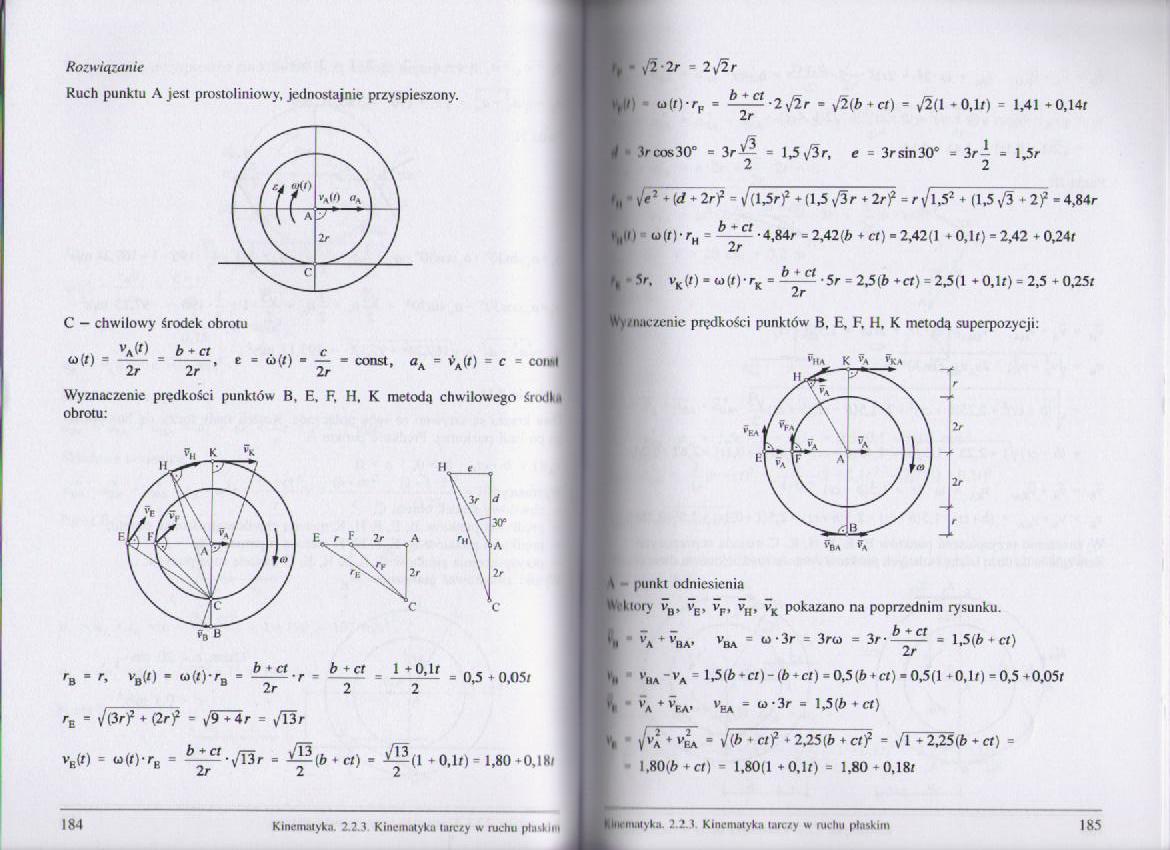
Ruch punktu A jest prostoliniowy, jednostajnie przyspieszony.
C — chwilowy środek obrotu
V') b + a
<j{/)
2 r
2 r
E = 0)<7) - -
2r
const, a. = vA(r) = c = cohm
:
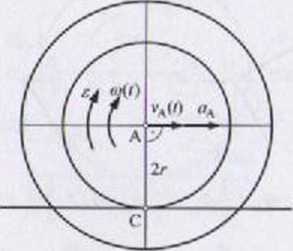
Wyznaczenie prędkości punktów B. E, F. H, K metodij chwilowego śriHlk.t obrotu:

rB a r> VB^ m r

0,5 + 0,05/
rE = yj$rf ♦ ^rj2 = V'9 + 4r = v'T3r vE{f) - 0)(f}-r8 = ^
(6 ♦ ct)
2
(1 +0,1/)- i,80*0,IK/
184
Kinenuuyka. 2.2.3 Kinematyka tarczy w ruchu płn\him
■ • fi‘2r = 2 J2r
l|/) u(f)-rp = £-^-2y/2r - /2(b + ct) = *0,1/) = 1,41 +0,14/
L - łrcos30° = 3r = \J5yj2r, e - 3rsin30° = 3= 1 JSr
B, - v*: + [d~+ 2rf = >j{\ćrf +[\,$fir +2rf = /• v'i,52 + (1,5 fi * 2? «4,84r
•*„!») <*>(/)•/*„ = ^^■4,84/- =2A2(b + c/)-2,42(l + 0,1/) = 2,42 + 0,24/
2r
f* • 5r. vK{/)-co(/)-rK = *^.5r = 2^(6+c/) = 2^(1 + 0,1/) = 2,5 + 0,25/
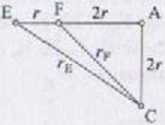
Wybaczenie prędkości punktów B. E. F, H, K metody superpozycji:
|
Pha K |
VA »KA |
|
/\VA _ | |
|
\ | |
|
K r »a \ |
PA || |
|
ER lF a |
J fal |
2r
*Ba *a


K - punkt odniesienia
K Mory vB> vE, vF, v„, vK pokazano na poprzednim rysunku.
''a v lW vba = w ‘3r = 3r<*> * 3r' = l'Sih * ct)
i„ v.ł|A-vA = \Mb~cn-(b-ct) = 0,5(b + c/) -0,5(1 *0,1 /) = 0,5 +0.05/ h * vEA = u>-3r = K5(^ ♦ cf>
L * v va ł vra = ♦ r/j2 ♦ 2,25(6 ♦ c/)2 = v'l + 2,25(6 + et) =
- 1,80(£ + et) ~ 1,80(1 +0,1/) = 1,80 + 0,18/
185
■tiirm.iiyka. 2.2.» Kinematyka tnre/y w rudni ołuskim
Wyszukiwarka
Podobne podstrony:
mechanika113 Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest ruchem jednostąinli przy
mechanika113 Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest ruchem jednostąinli przy
DSC00296 (18) Rozwiązanie Punkt M jest w mchu złożonym. Ruch unoszenia jest ruchem jednostajnie przy
PRACA W MECHANICE Jednostka miary W ruchu postępowym Jeżeli ruch ciała jest prostoliniowy a wektor
PRACA W MECHANICE Jednostka miary W ruchu postępowym Jeżeli ruch ciała jest prostoliniowy a wektor
MechanikaD9 Jeżeli ruch punktu przyłożenia siły jest ruchem obrotowym wokół stałego punktu 0,
Rozdział 2Kinematyka Definicja 3 Kinematyka jest to dział mechaniki opisujący ruch punktu lut) bryły
Ruch prostoliniowy jednostajnie przyspieszony Odniesienie do długości wektora r
mechanika82 Zadanie 2.5 Ruch punktu na płaszczyźnie jest opisany przez współrzędne x(f) = -2cos5r, y
DSC00298 (18) Zadanie 2.34 Punkt materialny M porusza się po okręgu wpisanym w kwadratową tarczę. Ru
DSC00304 (18) Kottfkzanie punkt M jest w ruchu płożonym. Ruch panoszenia jest obrotowy jednostajny,
Photo0019 W pompach tłokowych napędzanych przez mechanizm korbowy ruch zaworu jest funkcją prędkości
DSC09068 Rozwiązanie; 3 Odcinek AN jest prostopadły do promienia r (OP) dzieli go na połowy. Pu
DSC09068 Rozwiązanie; 3 Odcinek AN jest prostopadły do promienia r (OP) dzieli go na połowy. Pu
mechanika107 Rozwiązanie Stożek ruchomy jest w mchu kulistym typu precesja regularna. Kąt nut.iv ii
mechanika107 Rozwiązanie Stożek ruchomy jest w mchu kulistym typu precesja regularna. Kąt nut.iv ii
więcej podobnych podstron