017
nego manipulatora występują wyłącznie pary kinematyczne klasy V, czyli ps = 4 (2 przeguby obrotowe i 2 przeguby przesuwne).
Wykorzystując równanie (2.1), wyznaczono liczbę stopni swobody w równą: w = 6-4-5-4 = 4.
Aby ruch manipulatora o 4 stopniach swobody był ściśle określony', należy zastosować 4 napędy w sposób przedstawiony na rysunku 2.4b.
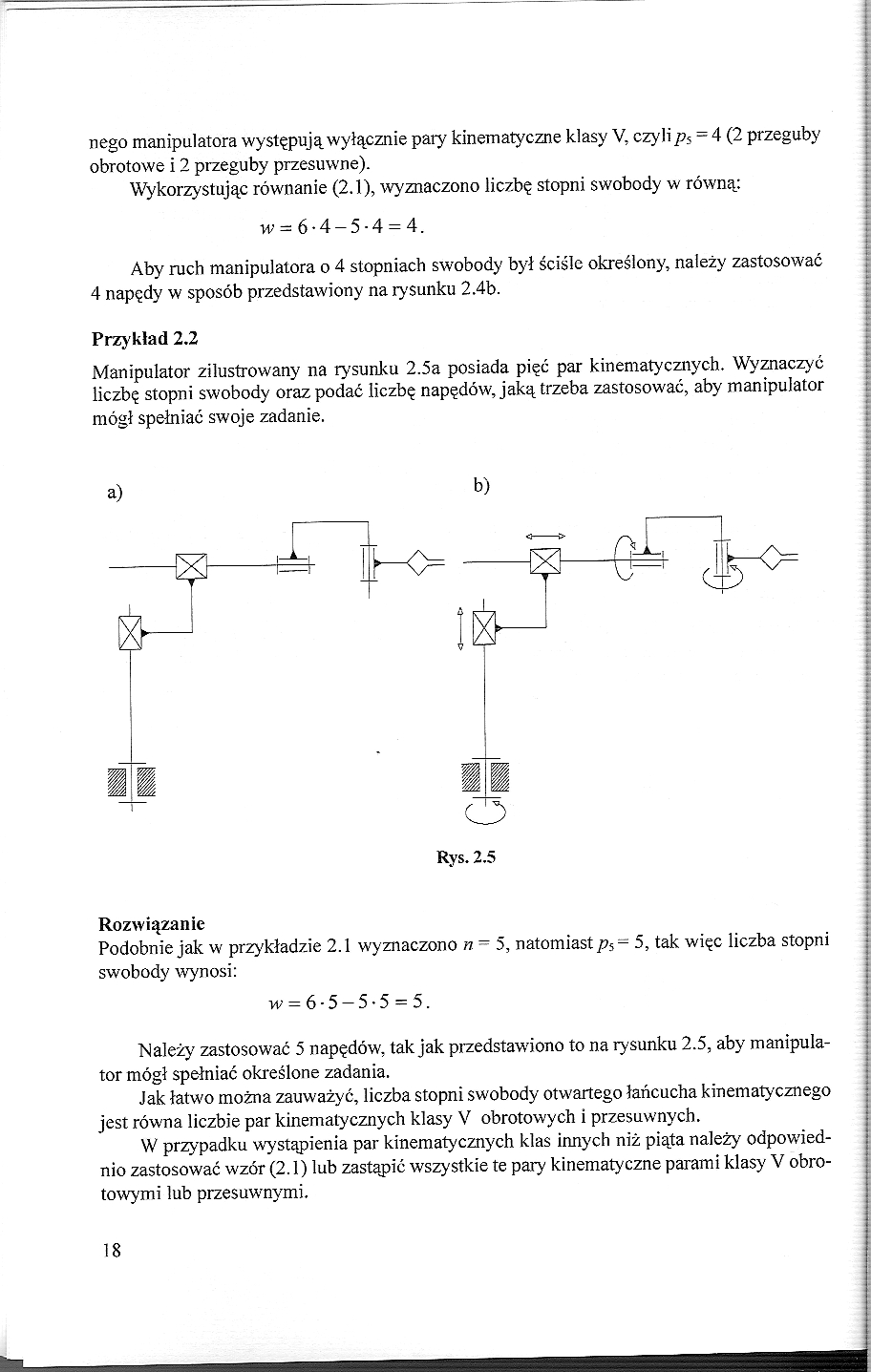
Przykład 2.2
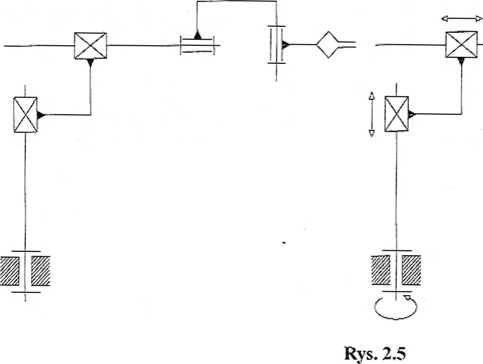
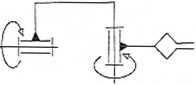
Manipulator zilustrowany na rysunku 2.5a posiada pięć par kinematycznych. Wyznaczyć liczbę stopni swobody oraz podać liczbę napędów, jaką trzeba zastosować, aby manipulator mógł spełniać swoje zadanie.
a) b)
Rozwiązanie
Podobnie jak w przykładzie 2.1 wyznaczono n = 5, natomiast p5 = 5, tak więc liczba stopni swobody wynosi:
w = 6-5 —5-5 = 5.
Należy' zastosować 5 napędów, tak jak przedstawiono to na rysunku 2.5, aby manipulator mógł spełniać określone zadania.
Jak łatwo można zauważyć, liczba stopni swobody otwartego łańcucha kinematycznego jest równa liczbie par kinematycznych klasy V obrotowych i przesuwnych.
W przypadku wystąpienia par kinematycznych klas innych niż piąta należy' odpowiednio zastosować wzór (2.1) lub zastąpić wszystkie te pary kinematyczne parami klasy V obrotowymi lub przesuwnymi.
18
Wyszukiwarka
Podobne podstrony:
Image 121 124 - wyłącznie z par kinematycznych V klasy (tzn. o 1 stopniu swobody -
63 Drugi zespół tej klasy, Ledo-Sphagnetum, występuje wyłącznie na południe od Zatoki Krzyżańskiej,
zykład 2.3 Dca manipulatora zilustrowanego na rysunku 2.6a posiadającego cztery pary kinematyczne,
Zdjęcie0214 Przez parę cierną rozumie się wszystkie możliwe skojarzenia (pary kinematyczne k w który
63 Drugi zespół tej klasy, Ledo-Sphagnetum, występuje wyłącznie na południe od Zatoki Krzyżańskiej,
zykład 2.3 Dca manipulatora zilustrowanego na rysunku 2.6a posiadającego cztery pary kinematyczne,
Image 123 126 Rys. 5.12b. Struktury kinematyczne chwytaków zawierające pary kinematyczne IV i V klas
2.1.2. Pary kinematyczne w budowie RPiM System ruchu robotów przemysłowych i manipulatorów (RPiM) je
skanuj0031 thumb Konta bilansowe aktywne występują wyłącznie w aktywach bilansu. Konta te służą do e
mity088 178 Rynga trafiła na Ruś, w Polsce występowała wyłącznie jako termin uczony, książkowy, ale
IMGg68 tylko dwóch uczniów jednocześnie; reguła ta reguluje przemieszczanie uczniów w przestrzeni kl
Kinematyka manipulatora przemysłowego Zadanie odwrotne kinematyki — polega na określeniu zestawu
mity088 178 Rynga trafiła na Ruś, w Polsce występowała wyłącznie jako termin uczony, książkowy, ale
więcej podobnych podstron