2011 12 19#;01;262
b i±zM = zź = ]m
• _3 — 3
3-CI—4-1350 -4-1350 ,
-ICC
-1350 Tablica Routh'a:
|
1 |
3 |
0 |
|
3 |
4 |
0 |
|
1.66 |
0 | |
|
4 |
0 |
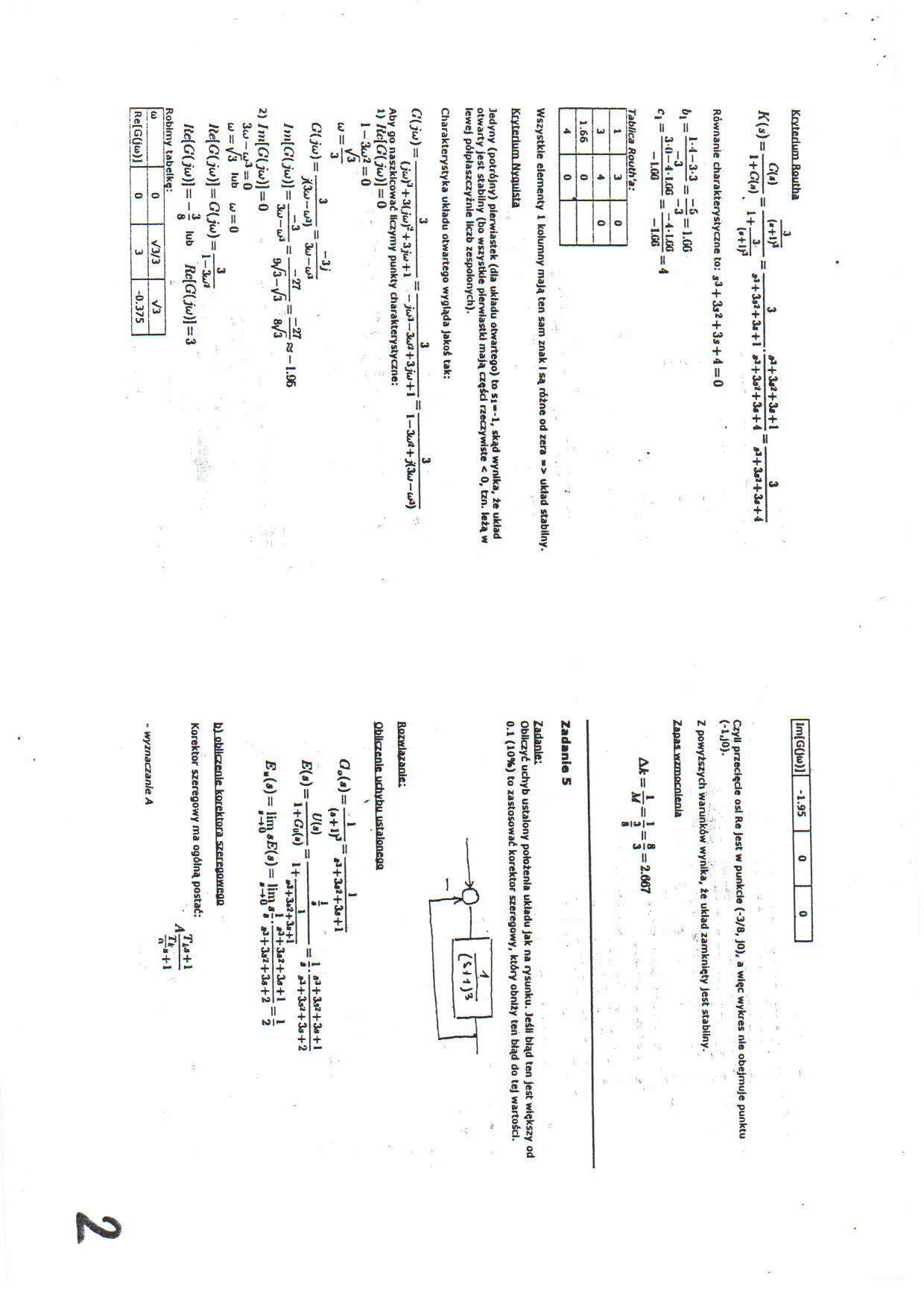
Wszystkie elementy 1 kolumny mają ten sam znak I są różne od zera ■> układ stabilny.
Jedyny (potrójny) pierwiastek (dla układu otwartego) to si--l, skąd wynika, te układ otwarty jest stabilny (bo wszystkie pierwiastki mają cząicl rzeczywiste < 0, tzn. leżą w lewej półpłaszczyżnle liczb zespolonych).
Charakterystyka układu otwartego wygląda jakoi tak:
■ . _J_ _J___J_
]U> (ifc/^+aijwf+ajw + l -jw*-3<JJ+3/u>+l l-3urt+j(3tu-u»J) Aby go naszkicować liczymy punkty charakterystyczne:
1) lU:[G(ju)) = Q l-3ru2 = 0
. </5
G{ju>) --^-= -—L-
ji Jur—u/>) 3or—o>t
/»l[6’(jur))=; “3 - -2T
2) /m[6’(i«*')] = 0 3ur — u>3 = 0 ui = \fi ,ub w = 0
HĄGU»)] = 00'^) = ^ lie[G(ju>)] = -ł lub Iic[G(jbi)\ = 3
O
|
... 0 |
V3/3 |
V3 |
|
[ p __ |
3 |
-0.375 |
Robimy tabelkę:
El
lm(G(ju)] | -ł.95 | 0~
Czyli przecięcie osi Re Jest w punkcie (-3/8, JO), a więc wykres nie obejmuje punktu (IJO).
7 —1..-$ li: .,
Z powyższych warunków wynika, że układ zamknięty jest stabilny.
v '
ŻIMI wzmocnienia

l
3
8
1 = 2.667
3
Padanie:
Obliczyć uchyb ustalony położenia układu Jak na rysunku. Jeśli błąd ten Jest większy od 0.1 (10%) to zastosować korektor szeregowy, który obniży ten błąd do tej wartoicl.
'I
Rozwiązanie:
Obliczenie uchybu ustalonego
\
1
ei+3a>+3a+l
I
1 aJ-ł-3.tf-t-3ad-l * aa-t-3*z+:U + 2
b) obliczenie korektora szeregowego Korektor szeregowy ma ogólną postać:
- wyznaczanie A
2
£.+1
Wyszukiwarka
Podobne podstrony:
2011 12 19#;01;262 3Kryterium ftoutha K(>) = G<*>__(«+0łl+CW i+_3__ (•+«>3 »J+3*J+3j + 1
2011 12 19#;01;26 egzaminPODSTAWY HUTO MOTYKIWrocław 23.01.2010EGZAMIN Z PODSTAW AUTOMATYKI - studia
2011 12 19#;01;263 G(ju>) = ——^z=r- = —p===- tykft+Pf (yw»+l f Zapas fazy Uczymy dla modułu równe
2011 12 19 ;53;59 PODSTAWY AUTOMATYKIWrocław 23.01.2010EGZAMIN Z PODSTAW AUTOMATYKI - studia niestac
2011 12 19 ;53;59 PODSTAWY AUTOMATYKIWrocław 23.01.2010EGZAMIN Z PODSTAW AUTOMATYKI - studia niestac
2011 12 19 ;52;523 , Taj+I - wyznaczanie A Transmltancja układu z korektorem: „ , >__1_
2011 12 19#;00;402 Transmitancja układu z korektorem: q łg =_i__ a>+3»z+3a+l ^,
więcej podobnych podstron