M025
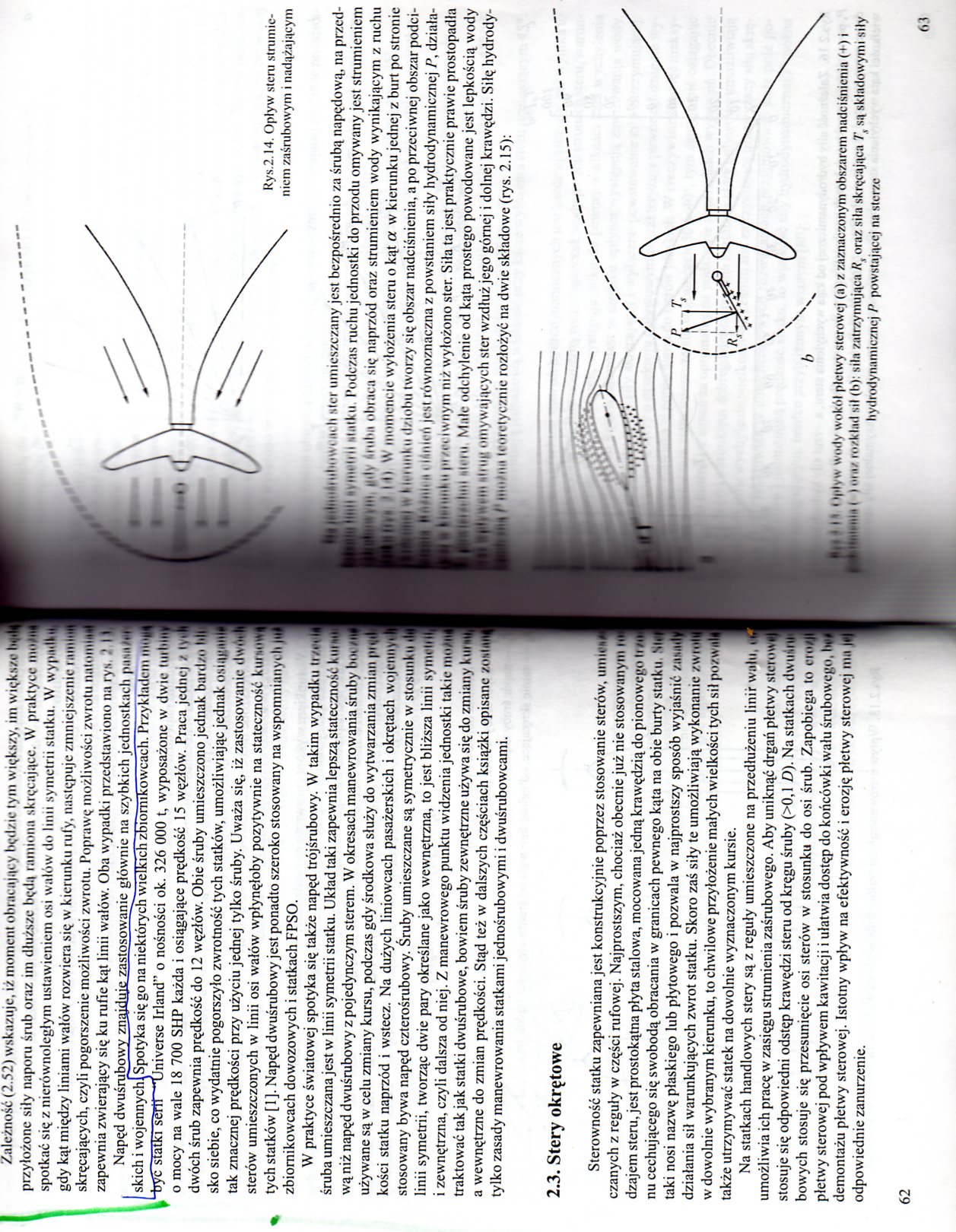
Zależność (2.52) wskazuje, 1/ moment obracający będzie tym większy, im większe li przyłożone siły naporu śrub oraz im dłuższe będą ramiona skręcające. W praktyce ino) spotkać się z nierównoległyin ustawieniem osi wałów do linii symetrii statku. W wyp.uht gdy kąt między liniami wałów rozwiera się w kierunku rufy, następuje zmniejszenie iiunli skręcających, czyli pogorszenie możliwości zwrotu. Poprawę możliwości zwrotu nalonil| zapewnia zwierający się ku rufie kąt linii wałów. Oba wypadki przedstawiono na rys.
Napęd dwuśrubowy znąiduie zastosowanie głównie na szybkich jednostkach pusnA^ skich i wojennychlSpotyka się go na niektórych wielkich zbiornikowcach. Przykładem mo rLbycTstatki sefir 'TJniverse Irland” o nośności ok. 326 000 t, wyposażone w dwie luibi;
0 mocy na wale 18 700 SHP każda i osiągające prędkość 15 węzłów. Praca jednej / lyif dwóch śrub zapewnia prędkość do 12 węzłów. Obie śruby umieszczono jednak bardzo li sko siebie, co wydatnie pogorszyło zwrotność tych statków, umożliwiając jednak osiągali tak znacznej prędkości przy użyciu jednej tylko śruby. Uważa się, iż zastosowanie dwu sterów umieszczonych w linii osi wałów wpłynęłoby pozytywnie na stateczność kuł su tych statków [1], Napęd dwuśrubowy jest ponadto szeroko stosowany na wspomniany! li | zbiornikowcach dowozowych i statkach FPSO.
W praktyce światowej spotyka się także napęd trójśrubowy. W takim wypadku ti /tą śruba umieszczana jest w linii symetrii statku. Układ taki zapewnia lepszą stateczność Kur wąniż napęd dwuśrubowy z pojedynczym sterem. W okresach manewrowania śruby hm używane są w celu zmiany kursu, podczas gdy środkowa służy do wytwarzania zmian pi kości statku naprzód i wstecz. Na dużych liniowcach pasażerskich i okrętach wojenny! stosowany bywa napęd czterośrubowy. Śruby umieszczane są symetrycznie w stosunku linii symetrii, tworząc dwie pary określane jako wewnętrzna, to jest bliższa linii symell
1 zewnętrzna, czyli dalsza od niej. Z manewrowego punktu widzenia jednostki takie mu traktować tak jak statki dwuśrubowe, bowiem śruby zewnętrzne używa się do zmiany km a wewnętrzne do zmian prędkości. Stąd też w dalszych częściach książki opisane /ust tylko zasady manewrowania statkami jednośrubowymi i dwuśrubowcami.
2.3. Stery okrętowe
Sterowność statku zapewniana jest konstrukcyjnie poprzez stosowanie sterów, umieli' czanych z reguły w części rufowej. Najprostszym, chociaż obecnie już nie stosowanym i dzajem steru, jest prostokątna płyta stalowa, mocowana jedną krawędzią do pionowego li / nu cechującego się swobodą obracania w granicach pewnego kąta na obie burty statku SI: taki nosi nazwę płaskiego lub płytowego i pozwala w najprostszy sposób wyjaśnić zmouj działania sił warunkujących zwrot statku. Skoro zaś siły te umożliwiają wykonanie /wio w dowolnie wybranym kierunku, to chwilowe przyłożenie małych wielkości tych sił pozwą! także utrzymywać statek na dowolnie wyznaczonym kursie.
Na statkach handlowych stery są z reguły umieszczone na przedłużeniu linir walu, i( umożliwia ich pracę w zasięgu strumienia zaśrubowego. Aby uniknąć drgań płetwy sterm stosuje się odpowiedni odstęp krawędzi steru od kręgu śruby (>0,1 D). Na statkach dwthi bowych stosuje się przesunięcie osi sterów w stosunku do osi śrub. Zapobiega to om płetwy sterowej pod wpływem kawitacji i ułatwia dostęp do końcówki wału śrubowego, I demontażu płetwy sterowej. Istotny wpływ na efektywność i erozję płetwy sterowej mu odpowiednie zanurzenie.
Rys.2.14. Opływ steru strumieniem zaśrubowym i nadążającym
, in li ster umieszczany jest bezpośrednio za śrubą napędową, na przed-Itti Itnuiiii .lulku Podczas ruchu jednostki do przodu omywany jest strumieniem Ifllt pili miiIiii obraca się naprzód oraz strumieniem wody wynikającym z ruchu iii W momencie wyłożenia steru o kąt a w kierunku jednej z burt po stronic I tfr k u i mik u dziobu tworzy się obszar nadciśnienia, a po przeciwnej obszar podci-HMitli u ' Uiilni jest równoznaczna z powstaniem sity hydrodynamicznej P, działa-
.......i u pi żniwnym niż wyłożono ster. Siła ta jest praktycznie prawie prostopadła
Mulml ..ii ni Małe odchylenie od kąta prostego powodowane jest lepkością wody Mmmi sil up omywających ster wzdłuż jego górnej i dolnej krawędzi. Siłę hydrody-l^llluMii leni etycznie rozłożyć na dwie składowe (rys. 2.15):
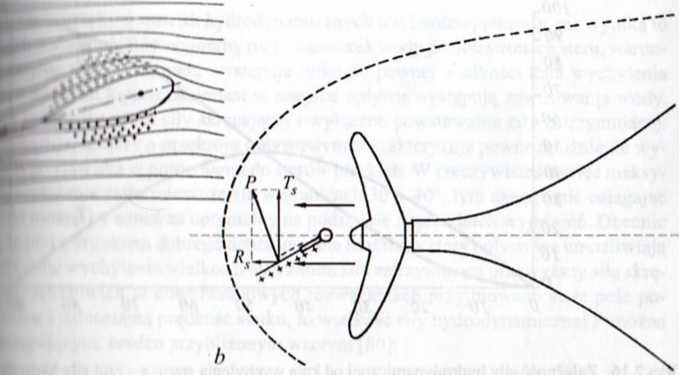
11 i i|il\ u wody wokół płetwy sterowej (a) z zaznaczonym obszarem nadciśnienia (•) i nilu i l oi .1/ lo/klml sil (b): siła zatrzymująca R oraz siła skręcająca 7', są składowymi siły hydrodynamicznej /’ powstającej na sterze
Wyszukiwarka
Podobne podstrony:
Stanisław Polanowski będzie tym mniejszy, im mniejszy będzie przedział aproksymacji, zdecydowano się
image020 (40) Ł Artykuły spożywcze Ł-23). Wydajność moszczu będzie tym większa, im bardziej owoce są
img049 (24) 104 Tom I f ■M 1 -S0+-/9CU 2 Optymalny okres dostaw części „D” z NRF będzie tym większy
Ciśnienie tętnicze -Ciśnienie będzie tym większe .im bardziej rozciągnięte będą ściany tętnic i im
Cialkoskrypt 2 182 3. Kinematyka płynu zakrzywiony profil prędkości, wartość ta będzie tym dokładnie
DSC02302 nego”. Zmienną niezależną będzie w tym przypadku środowisko rodzinne, a zmienną zależną pla
PICT6032 nego”. Zmienną niezależną będzie w tym przypadku środowisko rod?.jn. ne. a zmienną zależną
image 068 68 Pole bliskie anteny i jego znaczenie dla techniki antenowej Zależność (4.10) wskazuje,
skanuj0099 (22) 178 B. Cieślar Obliczamy największą (co do wartości bezwzględnej) wartość momentu zg
skanuj0007 (147) Od momentu gdy będziesz n>ógt skakać na skakance be/ przerwy przez tr/y minuty,
skanuj0051 (50) Metody pomocy Im więcej będzie ruchu i dotyku, tym większych sukcesów możemy oczekiw
skanuj0099 (22) 178 B. Cieślar Obliczamy największą (co do wartości bezwzględnej) wartość momentu zg
IMG233 233 19.4.4. Kompensacja noc; biernej Zależność cos od momentu obciążenia silnika asynchronicz
więcej podobnych podstron