skanowanie0058 (2)
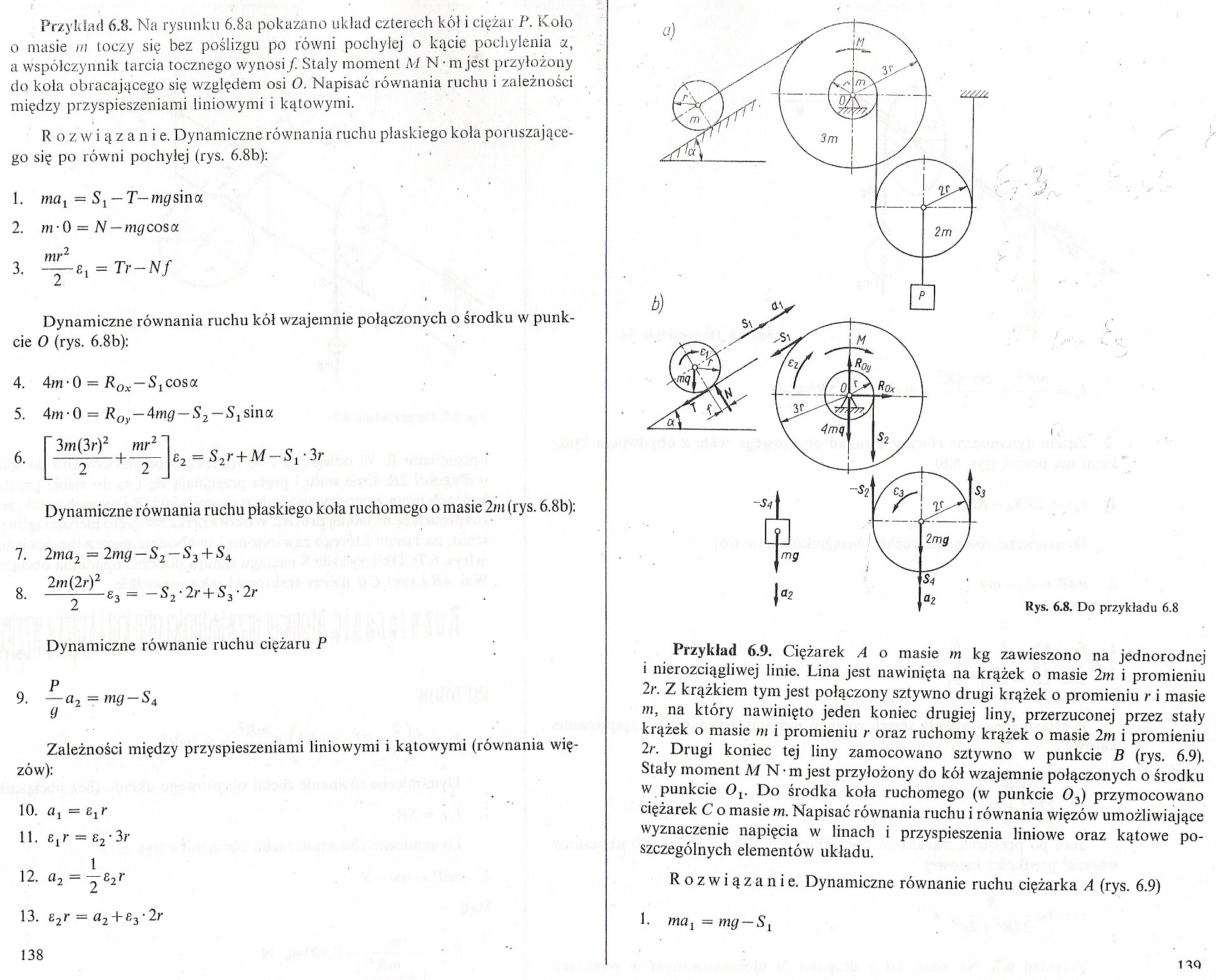
Przykład 6.8. Na rysunku 6.8a pokazano układ czterech kół i ciężar P. Koło o masie m toczy się bez poślizgu po równi pochyłej o kącie pochylenia a, a współczynnik tarcia tocznego wynosi /. Stały moment M N • iti jest przyłożony dp.koła obracającego się względem osi O. Napisać równania ruchu i zależności między przyspieszeniami liniowymi i kątowymi.
Rozwiązanie. Dynamiczne równania ruchu płaskiego koła poruszającego się po równi pochyłej (rys. 6.8b):
1. mal=Sl — T—mgsina
2. m*0 = N—mgcosa.
3- —2~s1 = Tr—Nf
Dynamiczne równania ruchu kół wzajemnie połączonych o środku w punkcie O (rys. 6.8b):
4. 4m-0 = R0x—SjCOsa
5. 4m-0 = R0y—Amg—S2 — Sasina
3m(3r):
A*
mr
e2 = S2r+M—Sl-3r
Dynamiczne równania ruchu płaskiego koła ruchomego o masie 2m (rys. 6.8b):
7. 2 ma2 = 2 mg—S2 — S3 + SĄ
o 2m(2r)2
8. —2—e3 m
—S2’2r+S3-2r
Dynamiczne równanie ruchu ciężaru P P
9. —a2 = mg-S4
y
Zależności między przyspieszeniami liniowymi i kątowymi (równania więzów):
10. flj m s2r
11. 6tr = e2-3r
12. a2 = — 82r
2 2 2
13. e2r = a2+e3-2r
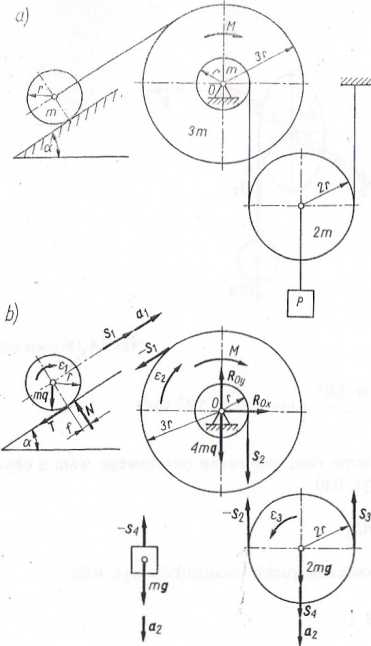

Rys. 6.8. Do przykładu 6.8
Przykład 6.9. Ciężarek A o masie m kg zawieszono na jednorodnej i nierozciągliwej linie. Lina jest nawinięta na krążek o masie 2m i promieniu 2r. Z krążkiem tym jest połączony sztywno drugi krążek o promieniu r i masie m, na który nawinięto jeden koniec drugiej liny, przerzuconej przez stały krążek o masie m i promieniu r oraz ruchomy krążek o masie 2m i promieniu 2r. Drugi koniec tej liny zamocowano sztywno w punkcie B (rys. 6.9). Stały moment M N • m jest przyłożony do kół wzajemnie połączonych o środku w punkcie Ov Do środka koła ruchomego (w punkcie 03) przymocowano ciężarek C o masie m. Napisać równania ruchu i równania więzów umożliwiające wyznaczenie napięcia w linach i przyspieszenia liniowe oraz kątowe poszczególnych elementów układu.
Rozwiązanie. Dynamiczne równanie ruchu ciężarka A (rys. 6.9)
1. mal = mg—Sl
Wyszukiwarka
Podobne podstrony:
skanowanie0062 (2) Przykład 6.13. Jednorodny walec o masie m kg i promieniu podstawy r m toczy się b
64601 Image7 (18) KonkursJak to działa? ł:i 566 96 50 Na rysunku przedstawiony jest układ z czterema
Na rysunku 3.57 pokazane są przebiegi napięcia i prądu w układzie obciążonym rezystancją R0 =10£2 po
skanowanie0060 (2) Rozwiązanie. Dynamiczne równania ruchu płaskiego krążka toczącego się bez poślizg
Slajd45 Przykład lb. Walce o promieniu r=2 m toczy się bez poślizgu z przyspieszeniem aA. Obliczyć&n
Slajd12 Przykład Stożek 1 o promieniu podstawy 1 wysokości R toczy się bez po
Slajd26 Przykład 1. Walce o promieniu r-2 m toczy się bez poślizgu z prędkością vA=4t m/s. Obliczyć&
DSC00274 (25) jeżeli rzeczywisty układ sił jest zbliżony do pokazanego na rysunku 4.8a, to -yjęcie z
IMG154 Na rysunku 2.89 pokazano przykład automatycznego kitowania cego połączenie szkła z oprawką re
więcej podobnych podstron