Image 018
W12-3
8.2. Sterowanie prędkości silnika synchronicznego
Zgodnie z zależnością (8.1) prędkość silnika synchronicznego może być sterowana przez zmianę częstotliwości zasilania fs lub przez zmianę liczby par biegunów pb. Ten drugi sposób w praktyce nie jest stosowany. Przy sterowaniu częstotliwościowym dla zakresu sterowania do prędkości znamionowej sterowanie powinno się odbywać przy znamionowym prądzie wzbudzenia wg. zasady
(8.8)
Us
—— = const.
fs
Otrzymuje się wówczas stałą, niezależną od prędkości, wartość przeciążalności silnika i dopuszczalnego momentu obciążenia. Dla częstotliwości wyższych od znamionowej silnik należy zasilać napięciem znamionowym i przy obniżonym prądzie wzbudzenia. Przeciążalność silnika i dopuszczalny moment obciążenia jest wóczas mniejszy od znamionowego.
8.3. Rozruch silników synchronicznych
W zakresie prędkości mniejszych od synchronicznej moment silnika synchronicznego ma charakter pulsujący o wartości średniej równej zero. Silnik nie może więc sam ruszyć i niezbędne jest stosowanie pomocniczych urządzeń rozruchowych.
8.3.1. Rozruch asynchroniczny
Jest to najczęściej stosowany sposób rozruchu silników synchronicznych. Wirnik silnika synchronicznego posiada oprócz uzwojenia wzbudzenia klatkę rozruchową wykonaną podobnie jak dla silnika asynchronicznego zwartego (ale zwymiarowaną tylko na krótkotrwałą pracę w czasie rozruchu). W silnikach z biegunami jawnymi rolę klatki rozruchowej mogą pełnić stalowe nabiegunniki. Typowe wartości prądu rozruchowego zawierają się w granicach 4 - 7 In, a początkowego momentu rozruchowego w granicach 0,5-1,0 Mn. Ważnym parametrem określającym możliwość przeprowadzenia udanego rozruchu obciążonego silnika jest tzw. moment wpadu, czyli moment podsynchroniczny dla poślizgu 3 = 0,05. Jego typowe wartości wynoszą od 0,7 - 1,2 Mn.
W czasie rozruchu asynchronicznego w uzwojeniu wzbudzenia indukują się w początkowej fazie rozruchu duże napięcia, które w przypadku pozostawienia otwartego uzwojenia mogą grozić uszkodzeniem izolacji. Dlatego na czas rozruchu uzwojenie wzbudzenia zwiera się opornikiem Rz, którego rezystancja powinna się mieścić w granicach 5-10 rezystancji uzwojenia wzbudzenia Rr. Zwieranie uzwojenia wzbudzenia ma niekorzystny wpływ na przebieg charakterystyk rozruchowych silnika. Pulsujący przepływ wytworzony przez prąd indukowany w uzwojeniu wzbudzenia o częsttliwości fr = f,s można rozłożyć na dwie składowe; współbieżną, która wiruje względem wirnika z prędkością CDsS, a względem stojana:
U)w ~ó) + coss = a)s{\- s) 4- coss = cos , (8.9)
a więc z prędkością synchroniczna. Składowa ta współdziałając z polem wirującym stojana wytwarza moment o przebiegu charakterystyn\ki podobnym do momentu klatki rozruchowej. Składowa przeciwbieżna wiruje względem stojana z prędkością:

co-coss- &>£(1 — j)
a>ss =
Składowa ta nie wytwarza momentu we współdziałaniu ze strumieniem głównym, ma bowiem inną częstotliwość. Indukuje ona natomiast w stojanie sem o identycznej częstotliwości pod wpływem której w obwodzie stojana płynie prąd, powstaje pole magnetyczne i w konsekwencji moment. Jak widać z zależności (8.10) przy poślizgu s = 0,5 moment od składowej przeciw-
)
W9-6
silnik napięciem znamionowym Usn o częstotliwości znamionowej otrzymamy równanie:


(6.19)
w którym Xsctn oraz Xmn oznaczają wartości odpowiednich reaktancji dla częstotliwości znamionowej, a Imo prąd magnesowania na biegu jałowym 'przy znamionowych warunkach zasilania silnika.
Jeżeli częstotliwość napięcia zasilającego jest przeliczamy zgodnie z równaniem:
różna od znamionowej reaktancje silnika

gdzie


jest względną częstotliwością zasilania silnika.
ś
Równanie (6.19) przy założeniu, że prąd magnesowania silnika nie ulegnie zmianie przyjmie postać:. -

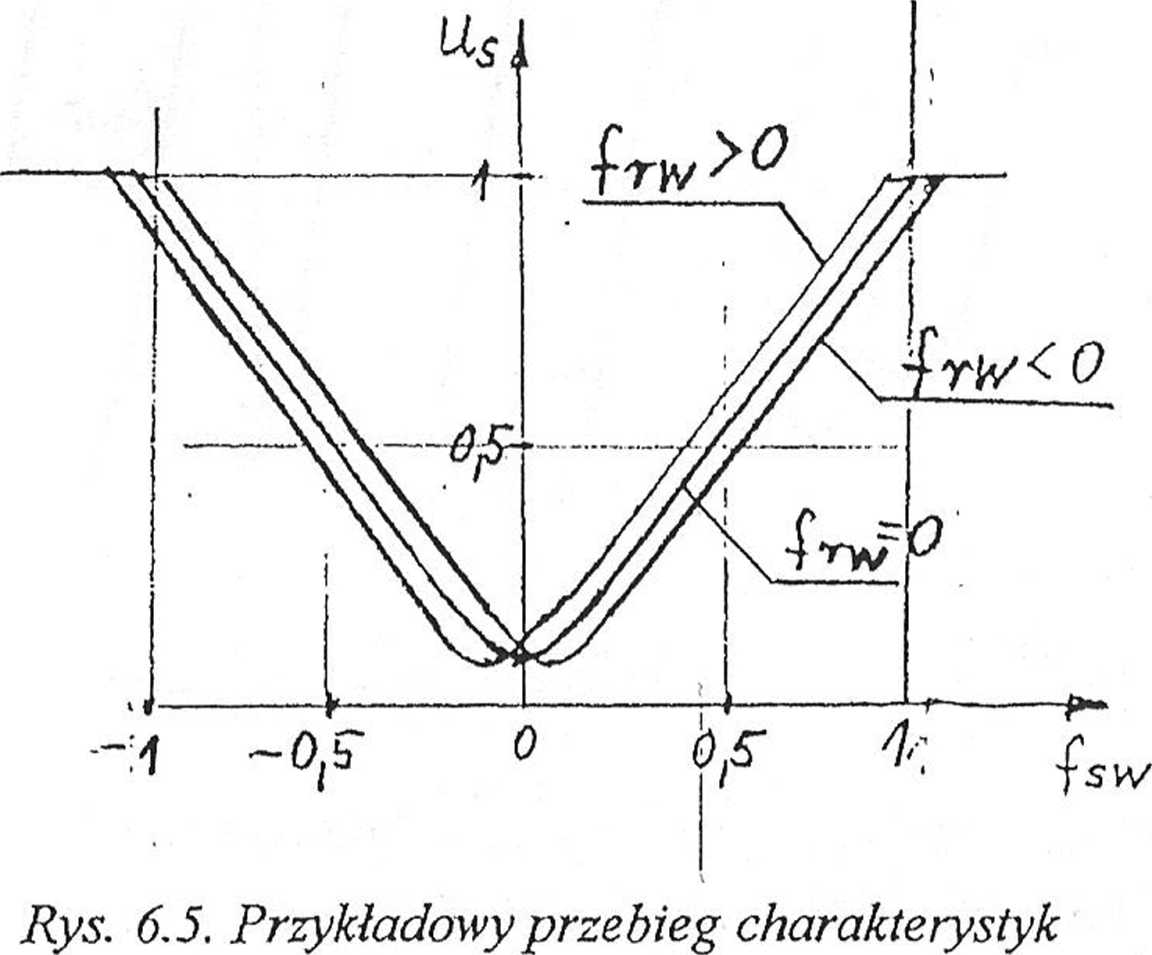
Porównując równania (6Ą2) i (6.21) otrzymuje się przedstawioną na rys. 6.5 zależność napięcia zasilania silnika od częstotliwości dla stabilizacji strumienia na biegu jałowym:



f(fs\v) Clld (j) (j)fj
■
Na rys. 6.5 ujemna wartość częstotliwości odpowiada odwrotnej kolejności faz napięcia zasilania. Przy częstotliwościach zasilanie większych od znamionowej nie można sterować napięcia zgodnie z zależnością (6.22). Napięcie zasilania byłoby wtedy większe od znamionowego, co nie jest dopuszczalne ze względu na izolację silnika. Przy stabilizacji napięcia zasilania na wartości znamionowej i częstotliwości większej od znamionowej silnik będzie pracował przy obniżonym strumieniu.
Przy pracy silnika z obciążeniem wartość napięcia us zależy ponadto od względnej częstotliwości wirnika (poślizgu) fm zdefiniowanej jako:
COs- (O
cosN
(6.23)
Natomiast na biegu jałowym i przy pominięciu rezystancji stojana zależność (6.22) upraszcza się do postaci:
Wyszukiwarka
Podobne podstrony:
1. Wstęp Celem ćwiczenia jest zbadanie właściwości sterowania prędkością silnika
P1180797 Sterowanie prędkością silników hydraulicznych (bm...... w obu kierunkach Zawór dtąwiący w g
DSC00590 Sterowanie prędkością obrotową silnika obcowzbudnego 1600 1500 1400 1300 -n 1200
DSC00592 (2) Sterowanie prędkością obrotową silnika szeregowego 2500 n-i-■-—r-i ■
strumień pochodzący od magnesów trwałych silnika synchronicznego prędkość kątowa wirnika silnika
1 (137) AVT1007 Regulator obrotów silnika elektrycznego Wysokiej klasy sterownik prędkości obrotowej
Sterowanie prędkością silników odbywa się za pomocą sygnałów PWM. Dzięki układom logicznym 74HCt08D
3.Sterowanie prędkością obrotową silnika obcowzbudnego :Charakterystyki: n(l)-prędkości obrotowej
19 Model wektorowego układu sterowania silnika synchronicznego z magnesami trwałymi. (2os) dr inż. R
Image 014 WYKŁAD 12 8. UKŁADY NAPĘDOWE Z SILNIKAMI SYNCHRONICZNYMI 8.1. Konstrukcja i podstawow
Image 016 W12-5 » kołysania. Sterowanie zewnętrzne częstotliwości można stosować dla napędów indywid
image 018 18 Parametry anten rakteryzowany przez dwa parametry: kierunek <ps[ (w stosunku do kier
image 032 32 Parametry anten kołowej (0 = 6,^ = ±7t/2). Zgodnie z definicją A. C. Ludwiga wersor okr
Po raz pierwszy terminem „mechatroniczny" nazwano sterownik elektroniczny silnika elektrycznego
więcej podobnych podstron