instalacje067
1. WSTĘP 18
przedstawiono dwubiegunową wersję silnika hybrydowego. W sytuacji przedstawionej na rys. 1.6 pasmo 1 uzwojenia stojana jest wzbudzone i wirnik zajmuje położenie wzdłuż osi pionowej. Wzbudzenie pasma 2 spowoduje przemieszczenie wirnika o kąt och — n/2. Następny skok zostanie wykonany po wzbudzeniu pasma i, lecz prądem o przeciwnym zwrocie. Jest to najprostsza wersja sterowania tego silnika, kiedy w danej chwili jest wzbudzone tylko jedno pasmo, lecz inne wersje są oczywiście również możliwe.
1.5. Rys historyczny rozwoju silników skokowych
Wiele informacji na temat historii rozwoju silników skokowych zawarto w publikacjach [1; 2]. Określenie dokładnej daty wynalezienia silnika skokowego jest trudne, gdyż w pierwszych maszynach elektrycznych prądu stałego wykorzystywano zasadę impulsowego przełączania uzwojeń. W świetle współczesnych poglądów mogłyby więc być ewentualnie zaliczone do grupy silników skokowych.
Jednym z pierwszych zarejestrowanych opisów na ten temat był zgłoszony w 1831 roku mechanizm skokowy o wzbudzeniu elektromagnetycznym, zaproponowany przez Sahatore del Negro. Pod koniec XIX wieku impulsowe mechanizmy znajdują szersze zastosowanie w związku z rozwojem telefonii i urządzeń zdalnego sterowania na okrętach wojennych.
Pasmo 1
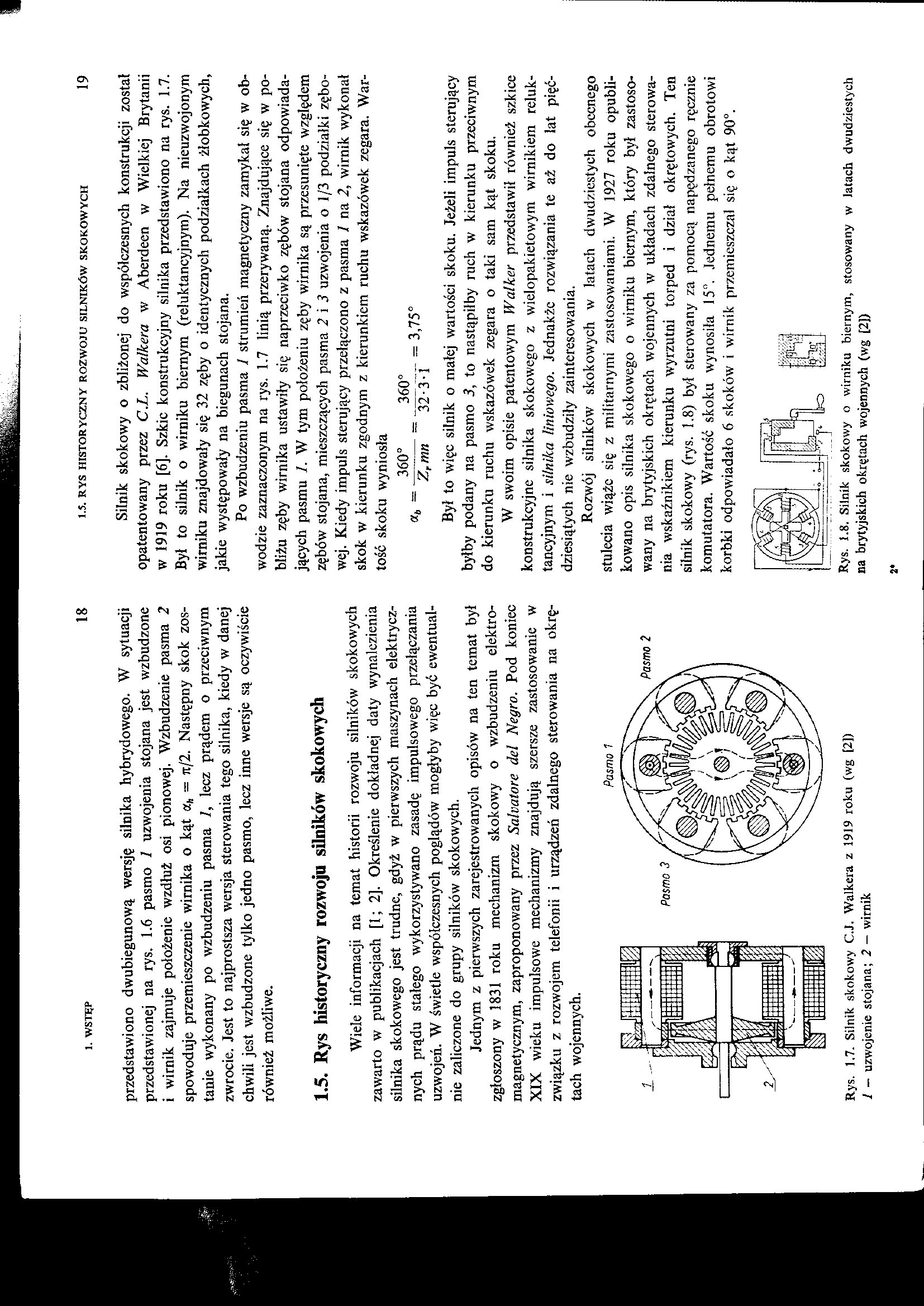
Rys. 1.7. Silnik skokowy C.J. Walkera z 1919 roku (wg [2]) 1 — uzwojenie stojana; 2 — wirnik
Silnik skokowy o zbliżonej do współczesnych konstrukcji został opatentowany przez C.L. Walkera w Aberdeen w Wielkiej Brytanii w 1919 roku [6], Szkic konstrukcyjny silnika przedstawiono na rys. 1.7. Był to silnik o wirniku biernym (reluktancyjnym). Na nieuzwojonym wirniku znajdowały się 32 zęby o identycznych podziałkach żłobkowych, jakie występowały na biegunach stojana.
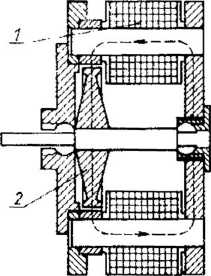
Po wzbudzeniu pasma 1 strumień magnetyczny zamykał się w obwodzie zaznaczonym na rys. 1.7 linią przerywaną. Znajdujące się w pobliżu zęby wirnika ustawiły się naprzeciwko zębów stojana odpowiadających pasmu 1. W tym położeniu zęby wirnika są przesunięte względem zębów stojana, mieszczących pasma 2 i 3 uzwojenia o 1/3 podziałki zębowej. Kiedy impuls sterujący przełączono z pasma 1 na 2, wirnik wykonał skok w kierunku zgodnym z kierunkiem ruchu wskazówek zegara. Wartość skoku wyniosła
3,75°
360° _ 360°
“ Zfmń “ 32~3 * i
Był to więc silnik o małej wartości skoku. Jeżeli impuls sterujący byłby podany na pasmo 3, to nastąpiłby ruch w kierunku przeciwnym do kierunku ruchu wskazówek zegara o taki sam kąt skoku.
W swoim opisie patentowym Walker przedstawił również szkice konstrukcyjne silnika skokowego z wielopakietowym wirnikiem reluktancyjnym i silnika liniowego. Jednakże rozwiązania te aż do łat pięćdziesiątych nie wzbudziły zainteresowania.
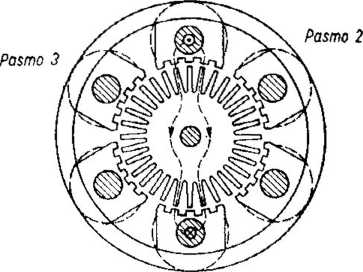
Rozwój silników skokowych w latach dwudziestych obecnego stulecia wiąże się z militarnymi zastosowaniami. W 1927 roku opublikowano opis silnika skokow-ego o wirniku biernym, który był zastosowany na brytyjskich okrętach wojennych w układach zdalnego sterowania wskaźnikiem kierunku wyrzutni torped i dział okrętowych. Ten silnik skokowy (rys. 1.8) był sterowany za pomocą napędzanego ręcznie komutatora. Wartość skoku wynosiła 15°. Jednemu pełnemu obrotowi korbki odpowiadało 6 skoków i wirnik przemieszczał się o kąt 90°.
Rys. t.8. Silnik skokowy o wirniku biernym, stosowany w latach dwudziestych na brytyjskich okrętach wojennych (wg [2)>
2*
Wyszukiwarka
Podobne podstrony:
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
5WW12 Sposób wykonania płytki drukowanej układu VOX przedstawiono na rys. 18. Układ BK (rys.T9) umoż
5 (2208) Silniki z aktywną szyną reakcyjną Na rys. 3 przedstawiono jednostronny silnik liniowy o uzw
CCF20110312�018 Przykładowe rozwiązanie instalacji piorunochronnej na dachu krytym słomą przedstawio
60913 spektroskopia009 18 6 — 20 eV przedstawiono na rys. 5. Pomiary w zakresie podczerwieni wymagaj
70133 Skrypt PKM 1 00097 194 Zadanie 5.8 Przedstawiony na rys. 5.18 układ napięto wstępnie silą A0 =
M Feld TBM018 18 1. Wiadomości ogólne Strukturalny schemat procesu technologicznego przedstawiono na
Kompletna struktura sterowania napędem hybrydowym została przedstawiona na rys. 3. Rys. 3. Układ ste
14130 instalacje113 4. TEORIA SILNIKÓW SKOKOWYCH 108 pokazanego na rys. 4.7, na którym dla uproszcze
153 3 Silnik NS03M - Mitsubishi Electrical Co., Ltd. Zgodnie ze schematem przedstawionym na rys. 6.6
Rydzanicz (12) Rys. 3.4 *> Rzut pomocniczy *> Rozwiązanie przedstawiono na rys. 15.1 iRys. 3
36142 Skrypt PKM 1 00009 18 W celu obliczenia poszukiwanych luzów można łatwo zbudować łańcuchy wymi
więcej podobnych podstron