14130 instalacje113
4. TEORIA SILNIKÓW SKOKOWYCH 108
pokazanego na rys. 4.7, na którym dla uproszczenia pominięto obwód pasma 2.
Każde z pasm było wzbudzane impulsami prostokątnymi napięcia w układzie bipolarnym, które są reprezentowane w analizie przez podstawową składową napięcia u(t). Rezystancja R, widoczna na rys. 4.7, jest sumą rezystancji pasma i rezystancji zewnętrznej, zwanej forsującą (patrz rozdz. 3).
W pierwszej kolejności będzie rozpatrzony silnik hybrydowy pracujący w stanie ustalonym z dużą prędkością przy danej częstotliwości zasilania. Oznacza to, że nie będzie rozpatrywane zagadnienie rezonansu przy malej częstotliwości ani też problem niestabilności przy dużych prędkościach.
Będzie rozpatrzony silnik pracujący ze stałą prędkością wirnika Qm. Uwaga będzie skupiona na tym, jak wpływa obciążenie na wale silnika na jego pracę oraz jak parametry układu wpływają na maksymalną moc, uzyskiwaną przy danej prędkości.
Napięcie wzbudzenia u (t) jest wyrażone wzorem
u^sjlU cos (ot (4.31)
Równanie napięć dla pasma / d^
u = Ri+~*~ (4.32)
Występująca w równaniu (4.32) wielkość zmienna W jest strumieniem skojarzonym z pasmem J, który można określić wzorem
V = Li+ N<Pm cos 0 (4.33)
Pierwszy czynnik jest związany z indukcyjnośeią własną pasma, drugi zaś zależy od strumienia <Pm magnesu trwałego i od liczby prętów /V W paśmie /.
Biorąc pod uwagę założenie o stałej prędkości kątowej Qm, kąt będzie określony wzorem
0 = (ot —

(4.34)
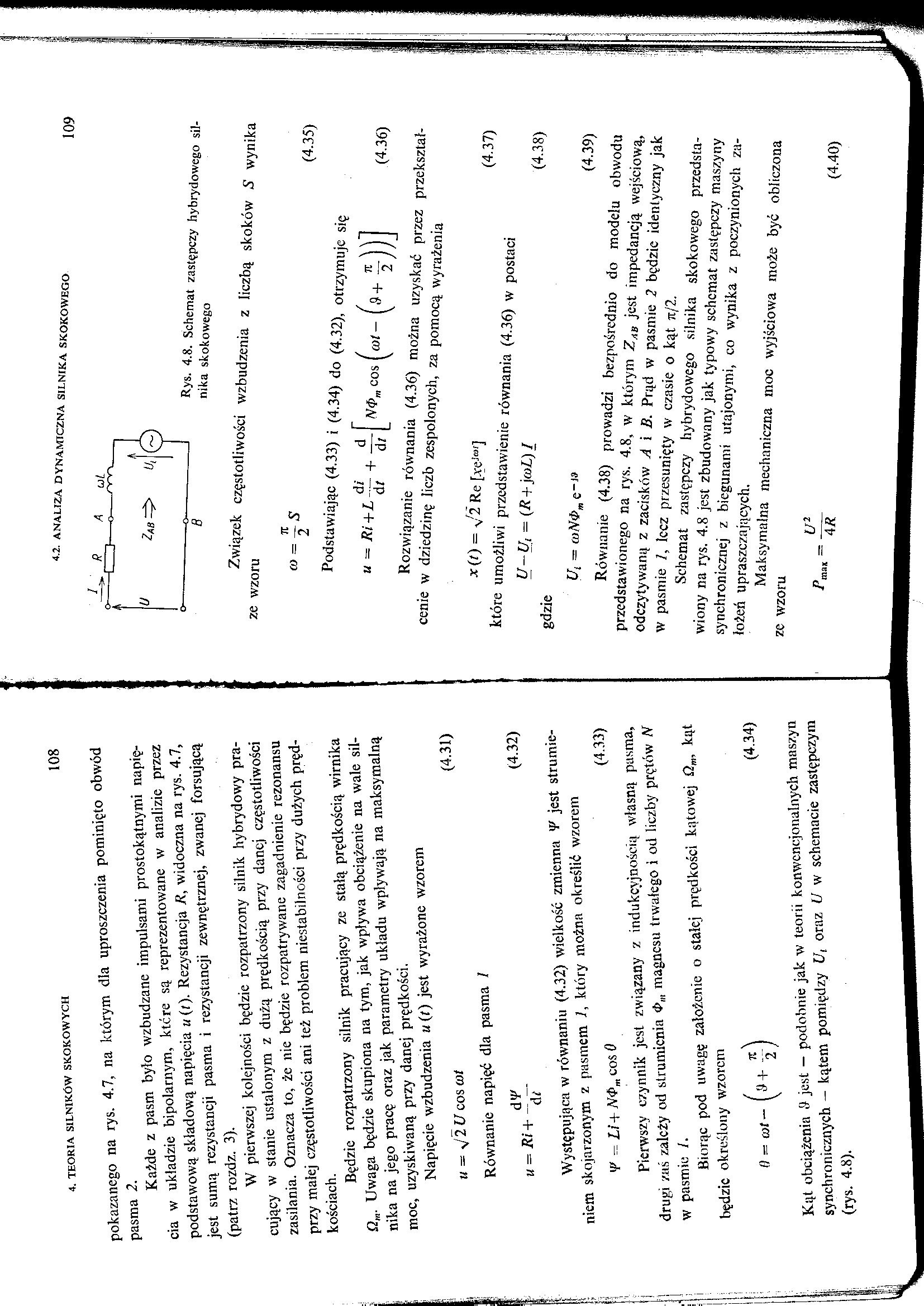
Kąt obciążenia jest — podobnie jak w teorii konwencjonalnych maszyn synchronicznych — kątem pomiędzy Ut oraz U w schemacie zastępczym (rys. 4.8).
o-
U
o
-o~
Zab Ut

B
Rys. 4.8. Schemat zastępczy hybrydowego silnika skokowego
Związek częstotliwości wzbudzenia z liczbą skoków S wynika ze wzoru
tt „ co = — S 2
Podstawiając (4.33) i (4.34) do (4.32), otrzymuje się , d/ d
u — Ri+L-—h —— N4>m cos
(4.35)
(4.36)
Rozwiązanie równania (4.36) można uzyskać przez przekształcenie w dziedzinę liczb zespolonych, za pomocą wyrażenia
x (t) = \ 2 Re [A'eJa,f]
które umożliwi przedstawienie równania (4.36) w postaci
(4.37)
U-Uj = (R + }(oL)I
gdzie
(4.38)
U i — 0iN4>m e_J3
(4.39)
Równanie (4.38) prowadzi bezpośrednio do modelu obwodu przedstawionego na rys. 4.8, w którym ZAB jest impedancją wejściową, odczytywaną z zacisków A i B. Prąd w paśmie 2 będzie identyczny jak w paśmie 1, lecz przesunięty w czasie o kąt tu/2.
Schemat zastępczy hybrydowego silnika skokowego przedstawiony na rys. 4.8 jest zbudowany jak typowy schemat zastępczy maszyny synchronicznej z biegunami utajonymi, co wynika z poczynionych założeń upraszczających.
Maksymalna mechaniczna moc wyjściowa może być obliczona ze wzoru
Pr
> - H2
ma* ~ ~4R
(4.40)
Wyszukiwarka
Podobne podstrony:
instalacje120 4. TEORIA SILNIKA SKOKOWEGO 122 Równania napięć na uzwojeniach stojana u - Rh -
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
instalacje105 4. Teoria silnika skokowego4.1. Stany pracy silnika skokowego Istotne znaczenie mają n
instalacje106 4. TEORIA SILNIKÓW SKOKOWYCH 94 Graniczna częstotliwość stanu quasistatycznego jest og
instalacje116 4. TEORIA SILNIKA SKOKOWEGO 114 gdzie (4.55) Podstawiając
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
instalacje121 4. TEORIA SILNIKA SKOKOWEGO 124 4. TEORIA SILNIKA SKOKOWEGO 124 (4.78) Równania napięć
instalacje122 4. TEORIA SILNIKA SKOKOWEGO 126 W celu uzyskania najkorzystniejszego tłumienia musi by
instalacje125 4, TEORIA SILNIKA SKOKOWEGO 132 wirnika silnika skokowego w chwili, kiedy nastąpi równ
74324 instalacje107 4. TEORIA SILNIKÓW SKOKOWYCH 96 kreskowany pomiędzy krzywymi A i B nazywa się ob
45996 instalacje114 4. TEORIA SILNIKÓW SKOKOWYCH 110 Ten wzór został uzyskany teoretycznie przy impe
instalacje109 4. TEORIA SILNIKÓW SKOKOWYCH 100 dancji źródła powoduje wzrost wartości R we wzorze (4
więcej podobnych podstron