instalacje120
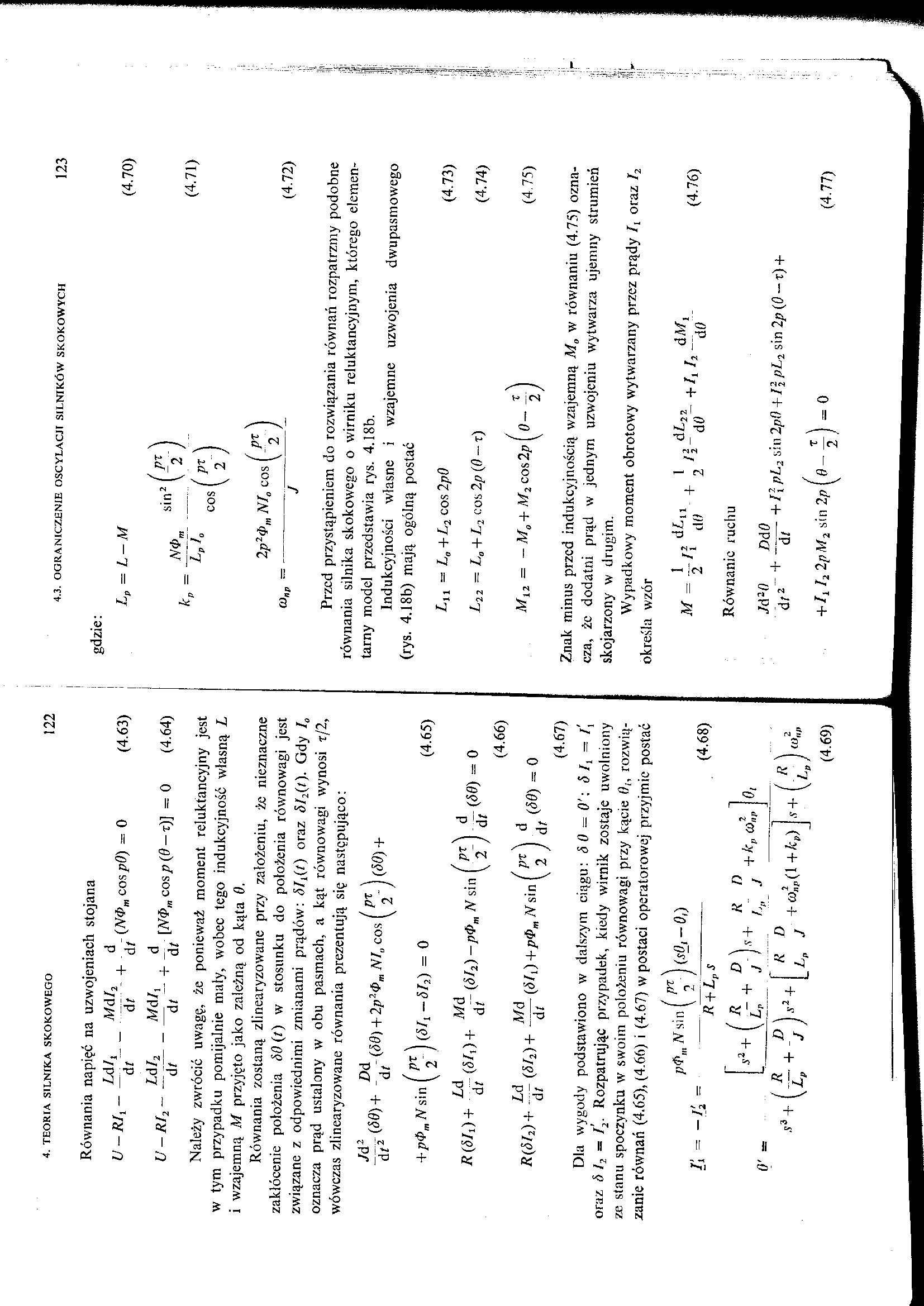
4. TEORIA SILNIKA SKOKOWEGO 122
Równania napięć na uzwojeniach stojana
u - Rh - - "d/2 + • £- (AW>„, cospfl) = 0 (4.63)
LAJ-2- - ^LAI1. + £[mmcosj>(9-z)] = 0 (4.64)
Należy zwrócić uwagę, że ponieważ moment reluktancyjny jest w tym przypadku pomijalnie mały, wobec tego indukcyjność własną L i wzajemną M przyjęto jako zależną od kąta 0.
Równania zostaną zlinearyzowane przy założeniu, że nieznaczne zakłócenie położenia 30 (t) w stosunku do położenia równowagi jest związane z odpowiednimi zmianami prądów: 3Jk(t) oraz 312(t). Gdy I0 oznacza prąd ustalony w obu pasmach, a kąt równowagi wynosi t/2, wówczas zlinearyzowane równania prezentują się następująco:
m + -DA (50) + 2p*>Pm N„ cos (P2T- j ( ) +
+p<P,„Nsm fP2r j (5/, -Sl2) = 0 (4.65)
K (51,) + (51,) + (SI2) -p<Pm N sin (P-) 1 (50) = 0
(4.66)
R(5h)+ “ «/2)+ («.)+^ATsin(PM d (<50) = 0
(4.67)
Dla wygody podstawiono w dalszym ciągu: 30 — 0': 3 Ą = /j oraz Ó 12 = l’2■ Rozpatrując przypadek, kiedy wirnik zostaje uwolniony ze stanu spoczynku w swoim położeniu równowagi przy kącie 0h rozwiązanie równań (4.65), (4.66) i (4.67) w postaci operatorowej przyjmie postać
li =
(4.68)
+
(4.69)
gdzie:
(470)
(4.71)
2p2<P,n NI0 cos
....

(4.72)
Przed przystąpieniem do rozwiązania równań rozpatrzmy podobne równania silnika skokowego o wirniku reluktancyjnym, którego elementarny model przedstawia rys. 4.18b.
lndukcyjności własne i wzajemne uzwojenia dwupasmowego (rys. 4.1 Sb) mają ogólną postać
LX1 = L0 +LZ cos 2p0 (4.73)
L22 = L0 + L2 COS 2/7 (0 - t) (4.74)
Mi2 = - M0+M2co$2p( 0-~ (4.75)
Znak minus przed indukcyjnością wzajemną M0 w równaniu (4.75) oznacza, że dodatni prąd w jednym uzwojeniu wytwarza ujemny strumień skojarzony w drugim.
Wypadkowy moment obrotowy wytwarzany przez prądy /l oraz I2 określa wzór
M =

dLn
dfl
+
1 j2 dL22_
2 2 dćT
+ /i/a
ÓM1
dO
(4.76)
Równanie ruchu
(4.77)
2 ~ + ff~ + / jPL2 sin 2pO + / \ pL2 sin 2p (0 — r) + + /i h 2pM2 sin 2/? — yj =0
Wyszukiwarka
Podobne podstrony:
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
instalacje121 4. TEORIA SILNIKA SKOKOWEGO 124 4. TEORIA SILNIKA SKOKOWEGO 124 (4.78) Równania napięć
instalacje116 4. TEORIA SILNIKA SKOKOWEGO 114 gdzie (4.55) Podstawiając
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
14130 instalacje113 4. TEORIA SILNIKÓW SKOKOWYCH 108 pokazanego na rys. 4.7, na którym dla uproszcze
64516 instalacje124 4. TEORIA. SILNIKA SKOKOWEGO 130 przy zasilaniu napięciem stałym D +
więcej podobnych podstron