64516 instalacje124
4. TEORIA. SILNIKA SKOKOWEGO 130
przy zasilaniu napięciem stałym
D + sin2 0„ + %K‘- cos2 0„
y ____^___
“ ~ [JK^W 7
2 co ”
oraz przy zasilaniu prądem stałym
(4.92)
Ci---------- *
cos2 0O
2 /—cos 0o
(4.93)
Przykład obwodu elektronicznego z rezystancją ujemną, zapewniającego intensywne tłumienie przedstawia rys. 4.22a, natomiast odpowiedź
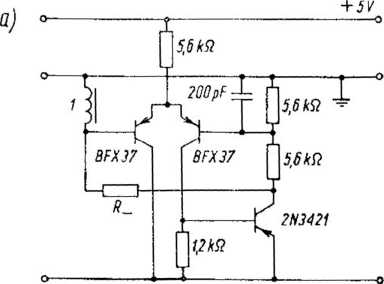
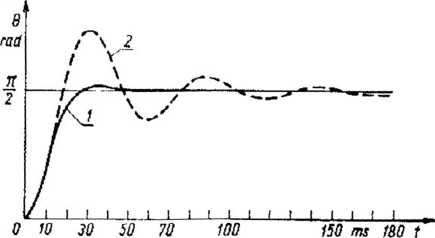
Rys. 4.22. Tłumienie elektroniczne z rezystancją ujemną: a) obwód elektryczny (/ — pasmo uzwojenia stojana); b) odpowiedź na pojedynczy skok (/ — z tłumieniem; 2 — bez tłumienia)
silnika na pojedynczy skok przy tłumieniu elektronicznym (linia ciągła) i bez tłumienia (linia przerywana) rys. 4.22b.
Przykładowo można podać wg pracy [67] dane obwodu tłumienia elektronicznego jednego z silników skokowych (wielkość mechaniczna 11):
Jt{ = 5,6-10~7kg-m2 D — 1,91 10-5N*m-s/rad Km = 3,0-10-2N-m/A Ke - 3,0-10“2V-s/rad t/ = 24 V R = 150 a L = 10-10_3H = -135Q
gdzie R_ oznacza rezystancję ujemną.
4.3.5. Ograniczanie oscylacji przez zastosowanie układu zamkniętego
Jest przyjęte rozpatrywanie pracy silnika skokowego w układzie otwartym. Jednakże silnik skokowy w układzie zamkniętym ma znacznie lepsze właściwości. Dotyczy to również problemu tłumienia oscylacji.
W pracy [98] na podstawie zamieszczonej analizy wykazano, że zastosowanie układu zamkniętego z regulatorami prędkości i położenia umożliwia otrzymanie szybko zanikającego procesu przejściowego. Zaproponowano wiele schematów blokowych z silnikami skokowymi w układzie zamkniętym, zapewniających taki proces przejściowy. Rozpatrując procesy przejściowe przy regulacji prędkości w szerokim zakresie częstotliwości wykazano, że optymalny proces przejściowy otrzymuje się przy / = 3000 Hz.
Również w układzie silnika skokowego z mikroprocesorem [99] w celu eliminowania oscylacji zastosowano sprzężenie zwrotne położeniowe, uzyskiwane za pośrednictwem potencjometru i przetwornika analogowo-cyfrowego. Po podaniu impulsu prądu do silnika skokowego w celu wymuszenia ruchu w pożądanym kierunku jednocześnie z wyłączeniem tego prądu włącza się impuls prądu drugiej fazy w celu hamowania
8*
Wyszukiwarka
Podobne podstrony:
45996 instalacje114 4. TEORIA SILNIKÓW SKOKOWYCH 110 Ten wzór został uzyskany teoretycznie przy impe
instalacje105 4. Teoria silnika skokowego4.1. Stany pracy silnika skokowego Istotne znaczenie mają n
instalacje106 4. TEORIA SILNIKÓW SKOKOWYCH 94 Graniczna częstotliwość stanu quasistatycznego jest og
instalacje116 4. TEORIA SILNIKA SKOKOWEGO 114 gdzie (4.55) Podstawiając
instalacje120 4. TEORIA SILNIKA SKOKOWEGO 122 Równania napięć na uzwojeniach stojana u - Rh -
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
instalacje121 4. TEORIA SILNIKA SKOKOWEGO 124 4. TEORIA SILNIKA SKOKOWEGO 124 (4.78) Równania napięć
instalacje122 4. TEORIA SILNIKA SKOKOWEGO 126 W celu uzyskania najkorzystniejszego tłumienia musi by
instalacje125 4, TEORIA SILNIKA SKOKOWEGO 132 wirnika silnika skokowego w chwili, kiedy nastąpi równ
74324 instalacje107 4. TEORIA SILNIKÓW SKOKOWYCH 96 kreskowany pomiędzy krzywymi A i B nazywa się ob
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
instalacje109 4. TEORIA SILNIKÓW SKOKOWYCH 100 dancji źródła powoduje wzrost wartości R we wzorze (4
instalacje115 4. TEORIA SILNIKÓW SKOKOWYCH 112 Moc maksymalna występuje kiedy /? = 0, punktem pracy
więcej podobnych podstron