60370 instalacje117
4. TEORIA SILNIKA SKOKOWEGO 116
gdzie moment odniesienia
(4.59)
Krzywe przedstawione na rys. 4.12 są bardziej przydatne dla użytko-nika od wykresu Blondella, gdyż są bardziej komunikatywne. Istotny wpływ wartości kp na przebieg krzywych jest oczywisty. Moc maksymalna (wyrażona przez hiperbolę odpowiadającą stałej mocy U2{4B) może być osiągnięta jedynie przy kp > 0,5 i tylko przy jednej prędkości. Gdy praca jest ograniczona do stosunkowo małych prędkości, wówczas jest pożądana duża wartość kp, natomiast przy pracy z dużą prędkością zadowalające jest kp w 0,5.
4.3. Ograniczanie oscylacji silników skokowych
4.3.1. Przyczyny powstawania oscylacji
Występowanie oscylacji prędkości kątowej silnika skokowego jest związane z bezwładnością mechaniczną, wyrażoną przez moment bezwładności J i elektryczną, wyrażoną przez indukcyjność L uzwojeń. Moment bezwładności J i indukcyjność uzwojeń L mają wpływ na energię kinetyczną poruszających się mas i energię potencjalną pola. Wykonywana praca mechaniczna jest równa przyrostowi energii pola. Przyrostowi energii

L.
a.-________i
, : 800 ' ms
0
400
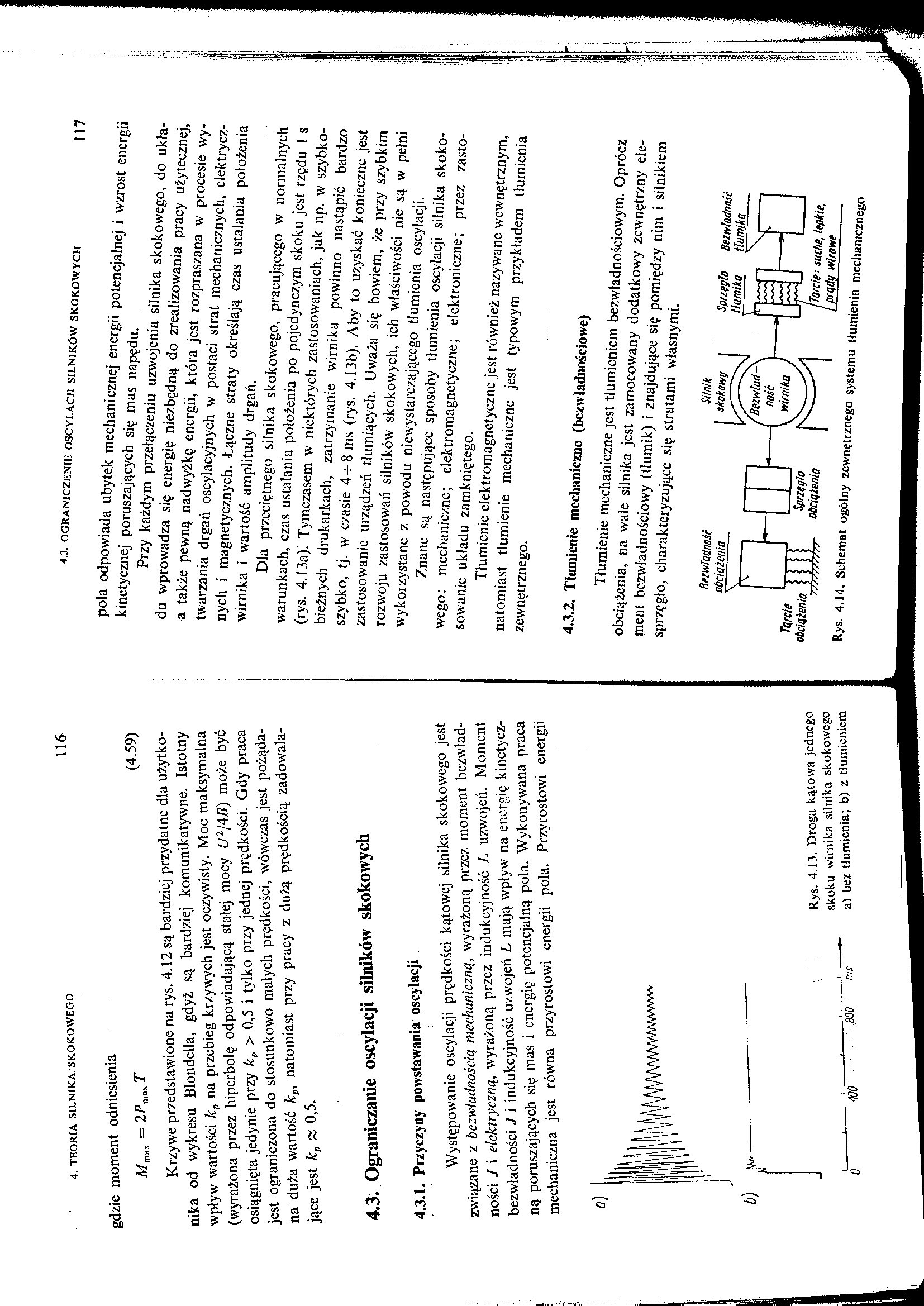
Rys. 4.13. Droga kątowa jednego skoku wirnika silnika skokowego a) bez tłumienia; b) z tłumieniem
pola odpowiada ubytek mechanicznej energii potencjalnej i wzrost energii kinetycznej poruszających się mas napędu.
Przy każdym przełączeniu uzwojenia silnika skokowego, do układu wprowadza się energię niezbędną do zrealizowania pracy użytecznej, a także pewną nadwyżkę energii, która jest rozpraszana w procesie wytwarzania drgań oscylacyjnych w postaci strat mechanicznych, elektrycznych i magnetycznych. Łączne straty określają czas ustalania położenia wirnika i wartość amplitudy drgań.
Dla przeciętnego silnika skokowego, pracującego w normalnych warunkach, czas ustalania położenia po pojedynczym skoku jest rzędu 1 s (rys. 4.13a). Tymczasem w niektórych zastosowaniach, jak np. w szybkobieżnych drukarkach, zatrzymanie wirnika powinno nastąpić bardzo szybko, tj. w czasie 4-r8ms (rys. 4.13b). Aby to uzyskać konieczne jest zastosowanie urządzeń tłumiących. Uważa się bowiem, że przy szybkim rozwoju zastosowań silników skokowych, ich właściwości nie są w pełni wykorzystane z powodu niewystarczającego tłumienia oscylacji.
Znane są następujące sposoby tłumienia oscylacji silnika skokowego: mechaniczne; elektromagnetyczne; elektroniczne; przez zastosowanie układu zamkniętego.
Tłumienie elektromagnetyczne jest również nazywane wewnętrznym, natomiast tłumienie mechaniczne jest typowym przykładem tłumienia zewnętrznego.
4.3.2. Tłumienie mechaniczne (bezwładnościowe)
Tłumienie mechaniczne jest tłumieniem bezwładnościowym. Oprócz obciążenia, na wale silnika jest zamocowany dodatkowy zewnętrzny element bezwładnościowy (tłumik) i znajdujące się pomiędzy nim i silnikiem sprzęgło, charakteryzujące się stratami własnymi.
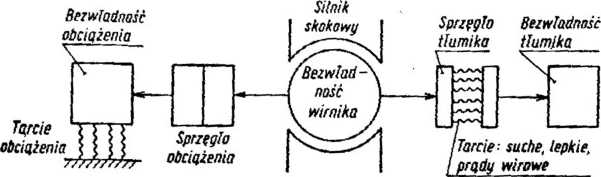
Rys. 4.14. Schemat ogólny zewnętrznego systemu tłumienia mechanicznego
Wyszukiwarka
Podobne podstrony:
instalacje116 4. TEORIA SILNIKA SKOKOWEGO 114 gdzie (4.55) Podstawiając
82070 instalacje110 4. TEORIA SILNIKÓW SKOKOWYCH 102 średni moment obrotowy zaś o (4.12) Założono, ż
33104 instalacje111 4. TEORIA SILNIKÓW SKOKOWYCH 104 Moment magnetyczny wirnika jest funkcją jego ge
instalacje105 4. Teoria silnika skokowego4.1. Stany pracy silnika skokowego Istotne znaczenie mają n
instalacje106 4. TEORIA SILNIKÓW SKOKOWYCH 94 Graniczna częstotliwość stanu quasistatycznego jest og
instalacje120 4. TEORIA SILNIKA SKOKOWEGO 122 Równania napięć na uzwojeniach stojana u - Rh -
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
instalacje121 4. TEORIA SILNIKA SKOKOWEGO 124 4. TEORIA SILNIKA SKOKOWEGO 124 (4.78) Równania napięć
instalacje122 4. TEORIA SILNIKA SKOKOWEGO 126 W celu uzyskania najkorzystniejszego tłumienia musi by
instalacje125 4, TEORIA SILNIKA SKOKOWEGO 132 wirnika silnika skokowego w chwili, kiedy nastąpi równ
więcej podobnych podstron