82070 instalacje110
4. TEORIA SILNIKÓW SKOKOWYCH 102
średni moment obrotowy zaś
o
(4.12)
Założono, że rezystancja i indukcyjność poszczególnych pasm są identyczne, co zazwyczaj występuje w praktyce. Ponadto w modelu założono zmienność indukcyjności pasma jako kosinusoidalną funkcję kąta 0, co jest do przyjęcia dla silników, w których stosunek szerokości zęba do grubości szczeliny powietrznej jest mniejszy niż 20.
Model matematyczny silnika skokowego o magnesie trwałym na wirnika
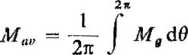
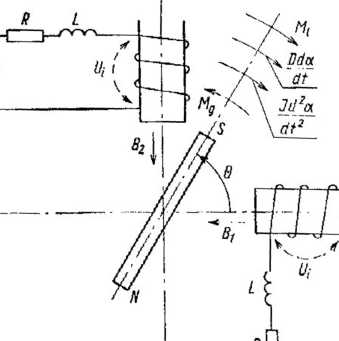
Jedną z podstawowych prac dotyczących dynamiki silnika skokowego o magnesach trwałych umieszczonych na wirniku jest publikacja D.J. Robinsona i C.K. Tafta [91], w której rozpatrzono zlinearyzowany model matematyczny tego silnika, analizowany w zakresie jednego skoku. Jakkolwiek autorzy nazywają swój model — modelem silnika skokowego o magnesach trwałych, to w świetle dzisiejszych pojęć, rozpatrywany silnik zaliczylibyśmy do grupy hybrydowych, gdyż opisany silnik ma na wirniku magnes trwały namagnesowany poosiowo i dwa uzębione pakiety
n2(t)
R
W1 urft)
Rys. 4.6. Schemat modelu silnika skokowego o magnesach trwałych na wirniku
z miękkiej magnetycznie stali po obu jego stronach, tak jak silnik pokazany na rys. 2.20a. W czasie kiedy była publikowana praca [91] nie posługiwano się jeszcze powszechnie pojęciem silnika hybrydowego.
Rysunek 4.6 przedstawia schemat modelu matematycznego silnika skokowego o magnesach trwałych wg [91]. Równania napięć doprowadzonych do pasm uzwojenia silnika mają postać
«,(') - «h(<)+L + U, (4.13)
(4.14)
Napięcie indukowane Ut jest generowane w pasmach uzwojenia stojana dzięki ruchowi wirnika z magnesem trwałym w stosunku do biegunów magnetycznych stojana. Zakładając sinusoidalny rozkład indukcji magnetycznej stojana i posługując się równaniami Maxwella, napięcie indukowane można wyrazić wzorem
(4.15)
rr Ke d0(/) .
gdzie:
Ke — stała wiążąca napięcie indukowane i indukcję magnetyczną stojana, V-s/stopieó;
Zr — liczba zębów wirnika.
Po uwzględnieniu zależności (4.15) równania różniczkowe napięć pasm uzwojenia stojana przyjmą postać
«ł(r) = Rii(t) +L
dt
*e
Zr
dfl(r)
dt
sin 0 (t)
(4.16)
«j(0 = Rix(,) ~ + A <«(') cos (4.17)
Moment obrotowy wytwarzany przez silnik skokowy przy obu pasmach zasilonych może być wyrażony — w zależności od indukcji magnetycznej B w stojanie i momentu magnetycznego H wirnika — równaniem
(4.18)
M9 = Bz IIcos 0 (t) - Bt Hsin 6 (/) w którym H — moment magnetyczny wirnika, A/m.
Wyszukiwarka
Podobne podstrony:
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
33104 instalacje111 4. TEORIA SILNIKÓW SKOKOWYCH 104 Moment magnetyczny wirnika jest funkcją jego ge
instalacje105 4. Teoria silnika skokowego4.1. Stany pracy silnika skokowego Istotne znaczenie mają n
instalacje106 4. TEORIA SILNIKÓW SKOKOWYCH 94 Graniczna częstotliwość stanu quasistatycznego jest og
instalacje116 4. TEORIA SILNIKA SKOKOWEGO 114 gdzie (4.55) Podstawiając
instalacje120 4. TEORIA SILNIKA SKOKOWEGO 122 Równania napięć na uzwojeniach stojana u - Rh -
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
instalacje121 4. TEORIA SILNIKA SKOKOWEGO 124 4. TEORIA SILNIKA SKOKOWEGO 124 (4.78) Równania napięć
instalacje122 4. TEORIA SILNIKA SKOKOWEGO 126 W celu uzyskania najkorzystniejszego tłumienia musi by
instalacje125 4, TEORIA SILNIKA SKOKOWEGO 132 wirnika silnika skokowego w chwili, kiedy nastąpi równ
instalacje146 6. BADANIA SILNIKÓW SKOKOWYCH 172 Zatem, moment bezwładności wirnika silnika skokowego
więcej podobnych podstron