instalacje115

4. TEORIA SILNIKÓW SKOKOWYCH 112
Moc maksymalna występuje kiedy /? = 0, punktem pracy zaś jest E. W warunkach obciążenia maksymalną mocą kąt obciążenia & jest równy ę.
Równanie maksymalnej możliwej mocy (kiedy punktem pracy jest E) może być ułożone na podstawie równań (4.43) i (4.46) przy /? — 0 z podstawieniem modułu z równania (4.42)
_ o>N<PmU _ <o*N*<HR
r'““ v !«- -,«/ )=] [K- + (a>vĄ 1 ' '
Odpowiednie wyrażenie na moment elektromagnetyczny wytwarzany przez dwupasmowy, dwubiegunowy silnik
(4.49)
Me —2
Podstawienie (4.48) do (4.49) daje wzór na moment obrotowy wyrażony za pomocą parametrów silnika.
Optymalne warunki uzyskiwania mocy maksymalnej można określić za pomocą dwu parametrów. Pierwszym z nich jest bezwymiarowy parametr kp, określany jako
kp =

(4.50)
który jest miarą względnej „siły” magnesu i uzwojenia.
Drugim parametrem jest stała czasowa T, określona jako
T = A (4.51)
Warunek uzyskania mocy maksymalnej możliwej przy prędkości Qnt może być wyrażony jednym prostym równaniem
(4.52)
Silnik skokowy o danych kp i T ma tylko jedną prędkość, przy której można uzyskać moc maksymalną. Przy prędkościach powyżej lub poniżej zdefiniowanego równaniem (4.52) optimum, silnik i napęd będą niedopasowane i otrzymana moc będzie mniejsza niż możliwa do uzyskania w warunkach optymalnych. Silnik, którego kp jest mniejsze niż 0,5, mocy maksymalnej nigdy nie osiągnie.
W dotychczasowych rozważaniach określano punkt pracy dla jednej prędkości, przy różnych wartościach obciążenia. W dalszym ciągu wykres kołowy Blondelła będzie pomocny przy rozpatrywaniu zachowania się silnika w szerokim zakresie prędkości w warunkach maksymalnego obciążenia przy typowych wartościach kp.
W warunkach maksymalnego obciążenia wykres kołowy Blondelła przybiera postać przedstawioną na rys. 4.10, gdzie punktami pracy są
U
R
X
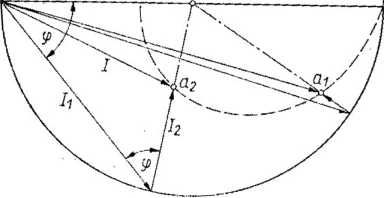
Rys. 4.10. Linia punktów pracy silnika skokowego przy zmiennej prędkości i maksymalnym obciążeniu, wyznaczona na wykresie kołowym Blondelła (wg [86])
ax i a2 (odpowiednio dla małych i dużych częstotliwości). Przy wzroście częstotliwości miejscem geometrycznym punktów pracy (takich jak av i a2) jest krzywa, pokazana na rys. 4.10 linią przerywaną. Biorąc pod uwagę, że położenie punktu pracy na wykresie pokazuje moc mechaniczną, jest dogodnie wykreślić rodzinę krzywych roboczych, aby otrzymać wszechstronną informację o właściwościach silnika w występującym zakresie prędkości. Jest to osiągalne przez znormalizowanie prądu do podstawy UjR i wyrażenie współrzędnych punktów pracy w znormalizowanej skali. Na przykład znormalizowane współrzędne punktu pracy a2 na rys. 4.10 wyrażają wzory

R
(4.53)

y'~~ 2 U~ S'm2v
R
(4.54)
8 Silniki skokowe
Wyszukiwarka
Podobne podstrony:
instalacje098 3. STEROWANIE SILNIKÓW SKOKOWYCH 78 wartość maksymalną, to wyłącznik W (rys. 3.9b) zos
instalacje105 4. Teoria silnika skokowego4.1. Stany pracy silnika skokowego Istotne znaczenie mają n
instalacje106 4. TEORIA SILNIKÓW SKOKOWYCH 94 Graniczna częstotliwość stanu quasistatycznego jest og
instalacje116 4. TEORIA SILNIKA SKOKOWEGO 114 gdzie (4.55) Podstawiając
instalacje120 4. TEORIA SILNIKA SKOKOWEGO 122 Równania napięć na uzwojeniach stojana u - Rh -
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
instalacje121 4. TEORIA SILNIKA SKOKOWEGO 124 4. TEORIA SILNIKA SKOKOWEGO 124 (4.78) Równania napięć
instalacje122 4. TEORIA SILNIKA SKOKOWEGO 126 W celu uzyskania najkorzystniejszego tłumienia musi by
instalacje125 4, TEORIA SILNIKA SKOKOWEGO 132 wirnika silnika skokowego w chwili, kiedy nastąpi równ
74324 instalacje107 4. TEORIA SILNIKÓW SKOKOWYCH 96 kreskowany pomiędzy krzywymi A i B nazywa się ob
45996 instalacje114 4. TEORIA SILNIKÓW SKOKOWYCH 110 Ten wzór został uzyskany teoretycznie przy impe
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
instalacje109 4. TEORIA SILNIKÓW SKOKOWYCH 100 dancji źródła powoduje wzrost wartości R we wzorze (4
więcej podobnych podstron