skanuj0018 (31)
174 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI
Dodając (a) + (c) oraz (b) + (d), dostajemy
cos d^_ = 8, (e)
rrij^ sin = 3. (f)
Dzieląc stronami równanie (e) przez równanie (f) uzyskujemy dj-j. = arc ctg j, stąd = 20,556° lub 200,556°.
Wobec tego i założenia m > 0 pozostaje tylko 20,556°.
Odejmując od równania (a) równanie (e) oraz od (b) równanie (d), uzyskujemy
m- cos dj = -1, sin d^ = -4.
Dzieląc stronami mamy
dj = arc ctg -jj-, skąd dj = 75,96° lub 255,96°.
Wobec tego i założenia > 0 pozostaje tylko 255,96°.
Podstawiając uzyskane wartości kątów do dowolnych dwóch równań (4.116) uzyskujemy
mn = 55-s^ = 8'51 9- mi = " = 4'16 * *Ą
4.6.4. Wyważanie optymalne wałów korbowych
W pewnych przypadkach jest celowy taki dobór mas korekcyjnych, aby ich suma była minimum. Stosuje się wówczas postępowanie znane z teori programowania liniowego.
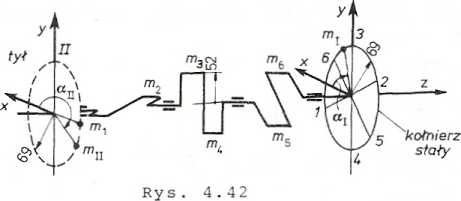
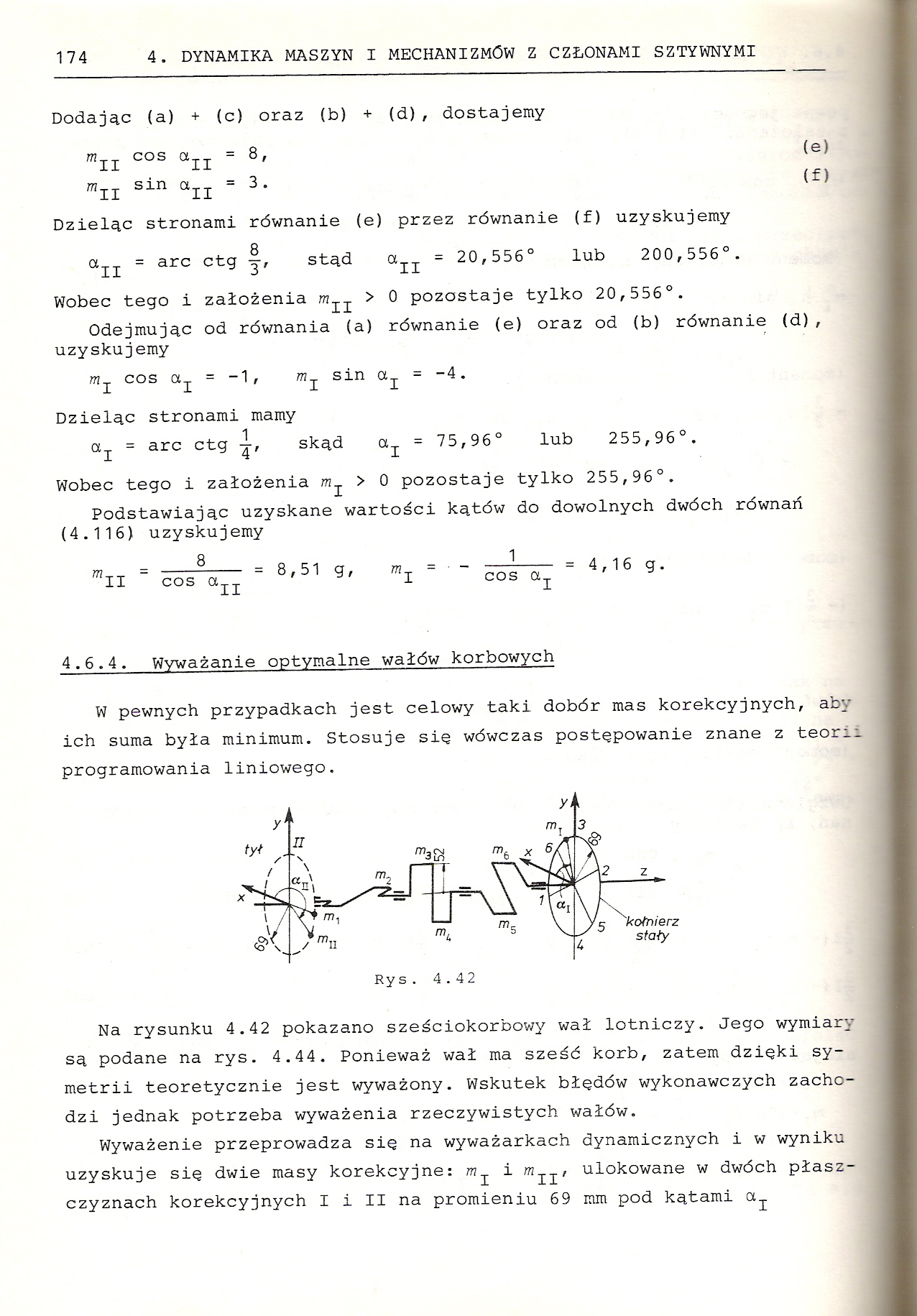
Na rysunku 4.42 pokazano sześciokorbowy wał lotniczy. Jego wymiary są podane na rys. 4.44. Ponieważ wał ma sześć korb, zatem dzięki symetrii teoretycznie jest wyważony. Wskutek błędów wykonawczych zachodzi jednak potrzeba wyważenia rzeczywistych wałów.
Wyważenie przeprowadza się na wyważarkach dynamicznych i w wyniku uzyskuje się dwie masy korekcyjne: i ulokowane w dwóch płasz
czyznach korekcyjnych I i II na promieniu 69 mm pod kątami d^
Wyszukiwarka
Podobne podstrony:
skanuj0018 (31) 174 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Dodając (a) + (c) oraz (b)
skanuj0014 (39) 170 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI skąd ml + mll = md mI1 2I
skanuj0016 (36) 172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 172 4. DYNAMIKA MASZYN I M
skanuj0020 (27) 176 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI PRZYKŁAD 4.24. Przyjmujemy
skanuj0022 (24) 178 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI = 360,167, ff?4 = 328,167,
skanuj0014 (39) 170 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI skąd ml + mll = md mI1 2I
skanuj0020 (27) 176 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI PRZYKŁAD 4.24. Przyjmujemy
skanuj0010 (64) 166 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Obliczamy straty mocy w po
56770 skanuj0012 (50) 168 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI gdzie r* = Siła Pg =
70706 skanuj0022 (24) 178 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI = 360,167, ff?4 = 32
11921 skanuj0030 (13) 186 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Po tym zabiegu mamy
40549 skanuj0026 (18) 182 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI że
62963 skanuj0016 (36) 172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 172 4. DYNAMIKA MASZ
więcej podobnych podstron