skanuj0020 (27)
176 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI
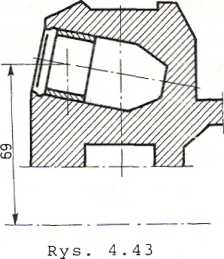
PRZYKŁAD 4.24. Przyjmujemy dane liczbowe: wij = 14,5 g, Wjj = 11,' aj = 190°, ajj = 82° (rys. 4.44). Z sześciu niewiadomych wybieramy dwie dowolne, np. m-j i uig, i wyrażamy pozostałe cztery niewiadome: m2' m3' m4' m5 za POI&ocą ^1 i wg, korzystając z /równań (4.117). Po przekształceniach otrzymujemy:
n?1 > 0,
77*2 = 1,033t/i^ - 0,033tti6 - 10,04 ^ 0,
tti3 = \ (0,9667t?71 + 1,033tt76 + 710,94 £ 0, (4 119)
7774 = ~ (1,033?n + 0,967tti6 + 646,296) £ 0,
77!5 = -0,033/7? 1 + 1,033t7?6 + 30,425 - 0,
m6 * 0- J
Funkcja celu ma postać
Z- ■ 3/»1 + 3tt?6 + 698,56. (4.120)

Tak sformułowane zadanie można rozwiązać wykreślnie. Na rysunku 4.45 zaznaczono sześć linii o równaniach = 0 (oznaczono je numera*
Wyszukiwarka
Podobne podstrony:
skanuj0020 (27) 176 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI PRZYKŁAD 4.24. Przyjmujemy
skanuj0014 (39) 170 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI skąd ml + mll = md mI1 2I
skanuj0016 (36) 172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 172 4. DYNAMIKA MASZYN I M
skanuj0018 (31) 174 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Dodając (a) + (c) oraz (b)
skanuj0014 (39) 170 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI skąd ml + mll = md mI1 2I
skanuj0018 (31) 174 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Dodając (a) + (c) oraz (b)
skanuj0010 (64) 166 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Obliczamy straty mocy w po
56770 skanuj0012 (50) 168 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI gdzie r* = Siła Pg =
11921 skanuj0030 (13) 186 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Po tym zabiegu mamy
40549 skanuj0026 (18) 182 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI że
62963 skanuj0016 (36) 172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 172 4. DYNAMIKA MASZ
skanuj0022 (24) 178 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI = 360,167, ff?4 = 328,167,
skanuj0024 180 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMIy. a y ■ dyi + dy? e* - d <p2
więcej podobnych podstron