56770 skanuj0012 (50)

168 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI
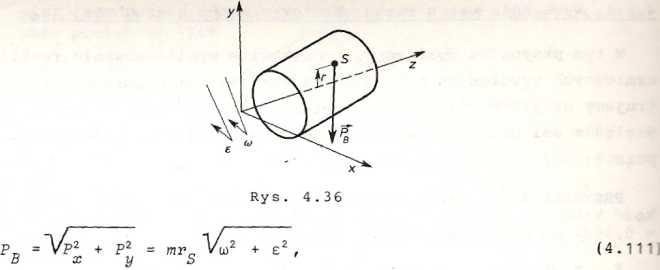
gdzie r* =
Siła Pg = 0 dla wszelkich o>, e tylko w przypadku = 0, tzn. jeżeli środek masy leży na osi obrotu. Mówimy wówczas, że człon jest wyważony statycznie.
Człon będzie wyważony całkowicie, jeżeli ponadto rzuty wektorów
momentu M , M [wzór (4.110)] będą równe zeru. Składowa M jest rów-x y a
nowaźona momentami sił zewnętrznych przyłożonych do członu (równanie
ruchu obrotowego) i nie wywołuje reakcji w podporach. Reakcje podpór
wywołane składowymi i ł(, będą równe zeru, jeżeli M =M = 0. Za-x y x y
chodzi to wówczas, gdy osie bezwładności są głównymi centralnymi osiami bezwładności, a oś z pokrywa się z jedną z jego głównych centralnych osi bezwładności.
Korekcja mas umożliwiająca spełnienie warunków Pg = 0 i = M-= 0 oraz zapewniająca zrównoważenie P^ i M^ jest możliwa tylko w
ruchu, a więc na drodze wyważania dynamicznego.
4.6.2, Wyważanie statyczne mas w ruchu obrotowym wokół nieruchomej
Jeżeli nie jest spełniony warunek Pg - 0, człon nazywany statycznie nie wyważonym. Za miarę statycznego niewyważania przyjmuje się wyrażenie
A = mr . (4.112) \
&
W celu statycznego wyważenia wystarczy na kierunku przeciwnym do po- 1 łożenia środka masy dodaó masę m^ . (tzw. przeciwwagę) w odległości od osi obrotu (rys. 4.37). Spełnienie warunku
Wyszukiwarka
Podobne podstrony:
skanuj0014 (39) 170 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI skąd ml + mll = md mI1 2I
skanuj0016 (36) 172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 172 4. DYNAMIKA MASZYN I M
skanuj0018 (31) 174 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Dodając (a) + (c) oraz (b)
skanuj0020 (27) 176 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI PRZYKŁAD 4.24. Przyjmujemy
skanuj0022 (24) 178 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI = 360,167, ff?4 = 328,167,
skanuj0014 (39) 170 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI skąd ml + mll = md mI1 2I
skanuj0018 (31) 174 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Dodając (a) + (c) oraz (b)
skanuj0020 (27) 176 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI PRZYKŁAD 4.24. Przyjmujemy
skanuj0010 (64) 166 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Obliczamy straty mocy w po
70706 skanuj0022 (24) 178 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI = 360,167, ff?4 = 32
11921 skanuj0030 (13) 186 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Po tym zabiegu mamy
40549 skanuj0026 (18) 182 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI że
62963 skanuj0016 (36) 172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 172 4. DYNAMIKA MASZ
więcej podobnych podstron