62963 skanuj0016 (36)

172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI
172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI
•1 Oi
czyznach korekcji I i II na promieniach = 50 mm i r#2 = 40 mm. Pozostałe dane są następujące: m-j = 2 kg, r-j =10 mm, 7W2 = 3 kg,
= 15 mm, ff?3 = 2 kg, 2*3 = 12 mm, = 4 kg, 2*4 = 20 mm. Odległości między masami wynoszą: l12 = ^23 = ^34 = 100 mm* Zakładamy, że wszyi kie masy leżą w jednej płaszczyźnie oraz wyważenia należy dokonać z* pomocą dwóch mas: -| i w^2*
Rozwiązanie. Ponieważ siły bezwładności mas i przeciww: powinny znajdować się w równowadze, wartości mi możemy określić z warunków (4.114).
Układając równania momentów statycznych względem punktów 01 i 02, otrzymujemy względem punktu 0-j wyrażenie
*3 r3 Z34 +
u
34
1 X1
23
'34'
Jd1 rd1 <*12 + *23 + *34* ’ °*
Podstawiając wartości liczbowe, otrzymujemy
2*12*100 + 3*15*200 - 2*10*300 _ n ^ md1 1 - 50-3Ó0-~ '’S°'36 kg‘
Z równania momentów sił względem punktu 02 będzie
4*20*300 - 2*12*200 - 3*15*100 _ . .
md2 40*300 1,225 kg.
Jeżeli po obliczeniach otrzymujemy znak minus, oznacza to, że przeciwwagę należy ulokować po przeciwnej stronie niż założono.
PRZYKŁAD 4.23. Dany jest układ wirujący o rozkładzie mas jak na rys. 4.41. Należy układ ten wyważyć dynamicznie przez dodanie dwóch mas: mj i mjj, ulokowanych w płaszczyznach korekcyjnych I i II na promieniach pj = pIX = 100 mm pod kątami aj i aXI. Dane: masy m-j =
= 10 g, = 15 g, m3 = 20 g, m4 = 10 g, promienie r-j = 50 mm, 2*2 = = 40 mm, 2*3 = 60 mm, r4 = 50 mm. Odległości pomiędzy masami l-\2=
= l23 = 734 = l. Kąty aj i ajj należy odmierzać od linii 0x w lewo.
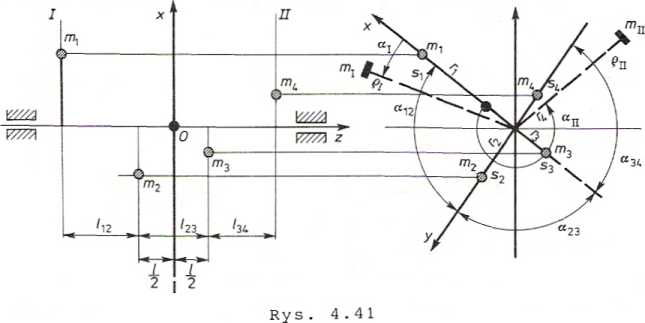
Rozwiązanie. Przyjmujemy układ współrzędnych Oxyz jak na rysunku co w tym przykładzie upraszcza równania, gdyż zerują się
Wyszukiwarka
Podobne podstrony:
skanuj0016 (36) 172 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 172 4. DYNAMIKA MASZYN I M
skanuj0052 (36) 172 MACIEJ JĘDRUSIK kosowego i tartymi lub siekanymi surowymi warzywami, głównie ceb
skanuj0010 (36) D-18. Dynamika układu ciał Na koło 2 układu ciał, przedstawionych na rysunkach D-18.
35159 skanuj0052 (36) 172 MACIEJ JĘDRUSIK kosowego i tartymi lub siekanymi surowymi warzywami, główn
skanuj0014 (39) 170 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI skąd ml + mll = md mI1 2I
skanuj0018 (31) 174 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Dodając (a) + (c) oraz (b)
skanuj0020 (27) 176 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI PRZYKŁAD 4.24. Przyjmujemy
skanuj0022 (24) 178 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI = 360,167, ff?4 = 328,167,
skanuj0014 (39) 170 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI skąd ml + mll = md mI1 2I
skanuj0018 (31) 174 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Dodając (a) + (c) oraz (b)
skanuj0020 (27) 176 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI PRZYKŁAD 4.24. Przyjmujemy
skanuj0010 (64) 166 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI Obliczamy straty mocy w po
56770 skanuj0012 (50) 168 4. DYNAMIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI gdzie r* = Siła Pg =
więcej podobnych podstron