Untitled Scanned 44
- 88 -
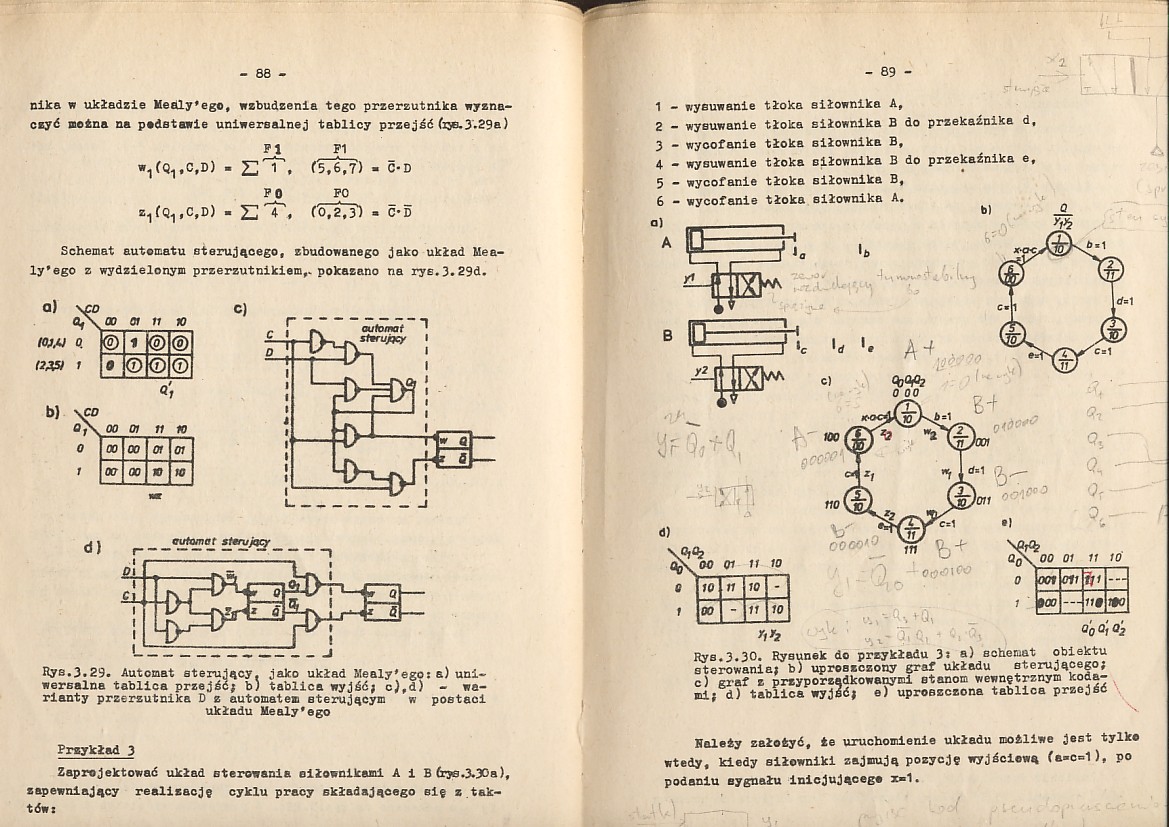
nika w układzie Ideały*ego, wzbudzenia tego przerzutnika wyznaczyć nożna na podstawie uniwersalnej tablicy przejść frjB.3.29a)
|
PI |
F1 |
|
*1(Q1.CfD) . £'l\ |
(5Xl) « Ć-D |
|
PO |
PO |
|
z1 Tq1 ,C,D) - I] |
('0,2,3') ■ Ć-D |
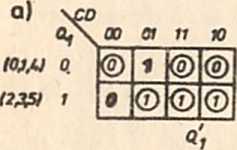
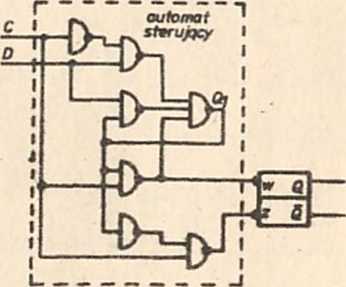
Schemat automatu sterującego, zbudowanego Jako układ Mea-ly*ego z wydzielonym przerzutnikiem,. pokazano na rys.3.29d.
C)
oo ot n to
|
00 |
00 |
or |
01 |
|
00 |
00 |
10 |
UJ |
automat starujocy
Rys.3.29. Automat sterujący. Jako układ Mealy*ego: a) uniwersalna tablica przejść; b) tablica wyjść; c),d) - wa
rianty przerzutnika D z automatem sterującym w postaci
układu Ideały*ego
Przykład 3
Zaprojektować układ sterowania siłownikami A 1 B ćrys.3.30a), zapewniający realizację cyklu pracy składającego się z taktów:
1 - 7,-y suwanie tłoka siłownika A,
2 - wysuwanie tłoka siłownika B do przekaźnika dt
3 - wycofanie tłoka siłownika B,
4 - wysuwanie tłoka siłownika B do przekaźnika ef
5 - wycofanie tłoka siłownika B,
b)

fljs. oo oi u 10
6 - wycofanie tłoka siłownika A.
|
10 |
ti |
10 |
- |
|
00 |
- |
11 |
10 |
'1*2
|
001 |
011 |
pi |
... |
|
900 |
--- |
119 |
190 |
°0 °1 °2
Rys.3.30. Rysunek do przykładu 3: a) schemat obiektu sterowania; b) uproszczony graf układu sterującego; c) graf z przyporządkowanymi stanom wewnętrznym kodami; d) tablica wyjść; e) uproszczona tablica przejść
Należy założyć, że uruchomienie układu możliwe jest tylko wtedy, kiedy siłowniki zajmują pozycję wyjściową (a-c=1), po podaniu sygnału inicjującego x«1.
Wyszukiwarka
Podobne podstrony:
Untitled Scanned 44 2 Ćwiczenie umiejętności ortograficznych Wyrazy ze zmiękczeniami przez „i"C
Untitled Scanned 44 108 Twierdzeniami dowolnej teorii aksjomatycznej są bowiem zawsze wszystkie te i
Untitled Scanned 44 • M
78541 Untitled Scanned 44 Ćwiczenie umiejętności ortograficznych Wyrazy ze zmiękczeniami przez „i&qu
Untitled Scanned 40 - 80 - Schemat układu Mealy*ego zbudowanego z elementów NASD pokazano na rys.3.2
Untitled Scanned 44 (2) 47 PLANIMETRIA 322. Kolarz jeździ po lorze w kształcie okręgu o średnicy 72
Untitled Scanned 44 (4) RUCH ZATRZYMANY Mechaniczne zatrzymanie ruchu (zwane w żargonie filmowym sto
Untitled Scanned 44 (5) IX. RUCHY KAMERY Wielkie odkrycia w estetyce filmowej są nie tyle bezimienne
Untitled Scanned 44 (3) Zgodnie z zasadami podanymi w p. 13.2 określono wartości T i N oraz sporządz
21211 Untitled Scanned 09 - 18 dających poszczególnym kodowanym liczbom. Wśród tego rodzaju kodów sz
21684 Untitled Scanned 92 (3) B 4.7 Ćwiczenia w pisaniu Redagowanie opowiadań Q Obejrzyj ilustrację
więcej podobnych podstron