Mechanika ogolna0002
(.5.
(.5.
RlH
3-5-1
3.5.5
3-5.3
obrotowy bryły wokół nieruchomego punktu (ruch kulisty).... 77
Opis mchu kulistego bryły ........................................................... 77
Uproszczona teoria ruchu kulistego............................................... 82
,, p ■ Ruch bąka symetrycznego............................................................ 87
dowolny bryły .......................................................................... 92
^f1?1°V ENERGETYCZNE opisu zjawiska RUCHU ................. 93
4.1. tne*. ■ ,
41-1
4-1-2
4.1.3
gia kinetyczna ............................................................................. 93
Energia kinetyczna punktu materialnego ....................................... 93
Energia kinetyczna bryły .............................................................. 94
4 2 Pra ^nerg*a kinetyczna układu brył..................................................... 98
4 2 skonana przez układ sił ........................................................ 100
^ 2 ł - Praca elementarna i całkowita wykonana przez siłę i układ sił......... 100
4.2.3
4.2. <i
4.2.5
4.2.6
4.2. >
Praca elementarna wykonana przez siły działające na bryłę ............ 102
Praca sił wewnętrznych................................................................ 107
Zasada równowartości energii kinetycznej i pracy.......................... 110
- Moc układu................................................................................. 116
Pole potencjalne sił .................................................................... 116
Zasada zachowania energii mechanicznej ...................................... 125
^Zas ^IKĄ ANAL,TYCZNA ......................................................... 131
' ^ * ^-tla prac przygotowanych (wirtualnych) ..................................... 131
5.1.2
Praca, przygotowana .................................................................... 131
Praca przygotowana układu sił działających na bryłę w mchu
5.1.3
postępowym ............................................................................... 133
Praca przygotowana układu sił działających na bryłę w mchu
5.1.4
obrotowym ................................................................................. 134
Praca przygotowana układu sił działających na bryłę w mchu
5.1.5
Praca przygotowana układu sił działających na układ brył
Zasa,
(np. mechanizm) ......................................................................... 135
tia ró>vnowagi kinetostatycznej...................... 145
h ró-wnanie dynamiki ............................................................... 149
I. Równania Lagrange’a.................................................. 154
5-4. „ Więzy i ich równania..................................... 154
5.4.2^ Wspcółrzędneuogólnione.............................................................. 158
5.4.3^ Uogólnione przesunięcie wirtualne ............................................... 161
5.4.5^ Rówmowaga układu..................................................................... 167
■>.4.8,
5.4.9,
5.4.7, Rówmowaga statyczna w polu polcncjnliiym.................................. 170
Rówmowaga Lagrange’a drugiego lod/iiju ..................................... 171
Inna wersja równań Lagrangói (lnigirgo rodzaju ..................... 1/8
IKATUR^......................................................................................... (Hi
WSTĘP
Dynamika to część mechaniki, która zajmuje się ruchem ciał i przyczynami powodującymi ten ruch. Tradycyjnie dynamikę dzielimy na następujące części:
• dynamikę punktu materialnego,
• dynamikę układu punktów materialnych.
Punkt materialny to najprostszy model ciała stałego. Mówimy na przykład o ruchu punktu M jako ustroju bezwymiarowym, któremu przypisano masę m (rys. 1).
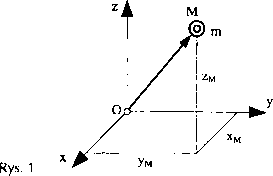
i'M = rM(t) jest to wektor promień, a w postaci analitycznej zapisujemy go jako: ,?M = xM,i+yM-j+zM,k-
Zasady dynamiki
W rozważań i a di przyjmujemy za podstawę zasady mechaniki klasycznej sformułowane przez Newtona. Zasady te zostały określone przy następujących założeniach: ruch punktu, którego masa jest siata, odbywa się względem nieruchomego układu odniesienia, a pomiar czasu rudni jest pomiarem czasu absolutnego (bezwzględnego).
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0002 obrotowy bryły wokół nieruchomego punktu (ruch kulisty).... 7
Mechanika)8 4. Elementy kinematyki 4.1. Kinematyka punktu. Ruch obrotowy bryły. Kinematyka - nauka b
Mechanika ogolna0049 Kuch dowolny bryły (rys. 52) Kuch dowolny można interpretować jako złożenie ruc
mechanika ogolna�6 1 Zadanie 3 Zredukować dany układ do punktu A, jeśli oczko siatki ma wymiary a x
Ruch obrotowy bryły wokół stałej osi symetrii, energia kinetyczna w tym ruchu. Moment bezwładności w
Mechanika ogolna0049 Kuch dowolny bryły (rys. 52) Kuch dowolny można interpretować jako złożenie ruc
Temat: Badanie ruchu obrotowego bryły sztywnej1 Wstęp teoretyczny Ruch obrotowy bryły sztywnej jest
skanuj0011 (55) 4.6., WYWAŻANIE MASZYN I MECHANIZMÓW 167 4.6.;1. Wyważanie mas w ruchu obrotowym wok
MechanikaD9 Jeżeli ruch punktu przyłożenia siły jest ruchem obrotowym wokół stałego punktu 0,
Mechanika ogolna0013 20 W układzie nieruchomym równanie opisujące ruch punktu materialnego zapisywal
Mechanika ogolna0048 natomiast prędkość liniowa punktu należącego do bryły: v; = co ■ h; = o> ■ -
więcej podobnych podstron