Rysunek 2�01

238 l/V ... B. Kinematyka
ona określenie położenia punktów należących do ciała w dowolnej chwili, nie zajmuje się natomiast przyczynami wywołującymi ruch.
1. Ruch punktu, tor, równania ruchu
Punkt znajduje się w ruchu, jeżeli jego położenie w stosunku do pewnego układu odniesienia zmienia się w miarę upływu czasu. Ruch jest więc pojęciem względnym, gdyż jest zależny od przyjęcia układu odniesienia. Zazwyczaj za nieruchomy układ odniesienia uważamy układ związany z Ziemią.
Torem punktu nazywamy linię, po której porusza się punkt w przestrzeni. Tor punktu może być linią płaską lub przestrzenną. Szczególnym przypadkiem ruchu po torze płaskim jest ruch wzdłuż linii prostej.
Jeżeli punkt M porusza się względem nieruchomego układu współrzędnych po pewnej linii (rys. 47), to dla określenia tego ruchu niezbędne jest podanie zależności pomiędzy współrzędnymi tego punktu a czasem, zwanych równaniami parametrycznymi ruchu
y = /,(t) [29?

Przez wyrugowanie z tego układu równań czasu można określić krzywą, po której porusza się punkt, czyli znaleźć równanie toru.
Możliwe jest również otrzymanie zależności między drogą przebytą przez punkt a czasem w postaci równania ruchu punktu
s = f(t) [30]
W chwili t = t0 *= 0 (rys. 48) punkt znajduje się w odległości s0 od pewnego stałego punktu O na torze ruchu zwanego początkiem drogi, a w chwili tt punkt jest oddalony o st od tego punktu itd.

Równanie ruchu punktu można przedstawić bezpośrednio na wykresie, na którym odkłada się długości przebytej drogi w funkcji czasu (rys. 49).

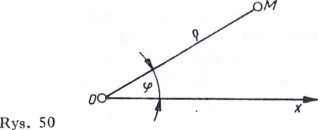
Równanie ruchu punktu można też przedstawić we współrzędnych biegunowych. Położenie punktu M na płaszczyźnie można określić za pomocą odległości od pewnego stałego punktu O, czyli długością promienia wodzącego q, oraz kąta 97, który tworzy promień wodzący z pewną stałą prostą x (rys. 50). Jeżeli obie te wielkości przedstawimy w funkcji czasu ty to otrzymamy równania ruchu w płaskich współrzędnych biegunowych
q i fi(0; = f2(0 Pi]
Cl
Ci
= C otrzymamy równanie krzy-

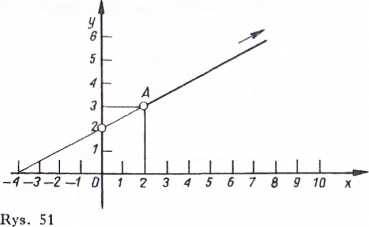
Przykład. Określić tor punktu jeśli dane są parametryczne równania ruchu
x — 2+41; y = 34-2t
Rugując parametr t znajdujemy równanie toru
y * ‘2’*+2 będące równaniem linii prostej (rys.
51), przy czym poruszający się punkt rozpoczyna ruch od punktu A o współrzędnych x = 2, y =3, w którym znajduje się w chwili t = 0.
Przykład. Należy wyznaczyć tor punktu, którego ruch jest opisany za pomocą współrzędnych biegunowych
r = Cit; <p = C2t gdzie Ct i C2 — stałe.
Rugując parametr t otrzymuje się równanie toru w postaci

oznaczając wej zwanej spiralą Archimedesa r m C<p
2. Prędkość i przyśpieszenie punktu
a. Prędkość w ruchu jednostajnym
Punkt porusza się ruchem jednostajnym jeżeli w ciągu jednakowych przedziałów czasu przebywa takie same drogi. Jeżeli w chwili i = 0 punkt znajdował się w odległości s0 od pewnego stałego punktu O leżącego na torze, zaś w chwili t odległość ta wynosiła s (rys. 52), to
Rys. 52 równanie ruchu punktu poruszającego się ruchem jednostajnym ma postać
s = s0 + vt [32]
gdzie v—wartość bezwzględna (moduł)1* prędkości ruchu jednostajnego.
Z zależności [32] wynika, że
s — s0
v =--
t
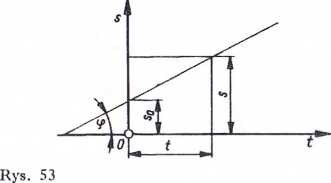
czyli prędkość ruchu jednostajnego jest równa ilorazowi długości przebytej drogi i czasu trwania tego ruchu. Interpretacją geometryczną zależności [32] jest linia prosta (rys. 53), której tangens kąta nachylenia odpowiada prędkości ruchu (przy uwzględnieniu przyjętych podzia-łek wykresu).
Podstawową jednostką prędkości jest 1 m/s, pochodnymi — 1 km/h, 1 m/min itp. Prędkość jest wielkością wektorową, ponieważ dla jej określenia oprócz wartości jest niezbędna znajomość jej kierunku oraz zwrotu.
b. Prędkość w ruchu zmiennym
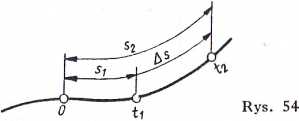
Punkt porusza się ruchem zmiennym (niejednostajnym) jeżeli w ciągu jednakowych przedziałów czasu przebywa po swym torze różne drogi. Jeżeli w chwili ti punkt znajdował się w odległości $1, zaś w chwili t2 w odległości s2 od nieruchomego punktu O (rys. 54), to
o W niektórych przypadkach przy rozpatrywaniu prędkości i przyśpieszeń pominięto wyraz wartość (moduł), co jest skrótem przy skal arowym określaniu tych wielkości.
Wyszukiwarka
Podobne podstrony:
Rysunek 2�03 242 l/V ... B. Kinematyka 242 l/V ... B. Kinematyka [47b] s s—vt t2 = 2 a 160 m/min2 [4
Rysunek 2�05 246 l/V ... B. Kinematyka 246 l/V ... B. Kinematyka Przyśpieszenie unoszenia — składowa
Rysunek 2�06 •I i! •I i! 248 l/Y ... B. Kinematyka i i 11 jt ijf lii kątowa co wokół tego punktu, t
Rysunek 2�06 •I i! •I i! 248 l/Y ... B. Kinematyka i i 11 jt ijf lii kątowa co wokół tego punktu, t
026 027 2 26 Programowanie liniowe Rysunek 1.3 Rysunek 1.4 i «2 /~ 4x, =
33932 Rysunek 2�02 240 I/V ... B. Kinematyka prędkość średnia punktu na drodze s2 — s i = = As wynie
44621 Rysunek 2�04 244 l/V ... B. Kinematyka kątową dotyczy również ruchu zmiennego. Przyśpieszenie
więcej podobnych podstron