026 027 2
26 Programowanie liniowe
Rysunek 1.3 Rysunek 1.4
|
i «2 |
/~ 4x, = 16 |
1 Xj |
x,>0 | ||
|
4x, <16 |
I I I | ||||
|
0(0.0) |
(4,0) x, |
0(0,0) |
*1 | ||
Rysunek 1.5
x2
0(0.0)
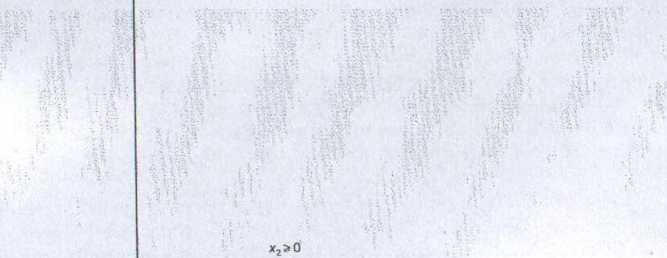
Z kolei znajdujemy obszar będący części;) wspólną półpłaszczyzn wyznaczonych przez kolejne warunki ograniczające (rys. 1.6).
Rysunek 1.6
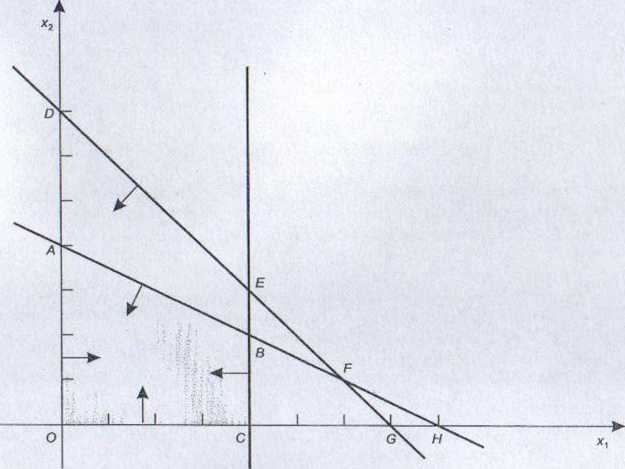
Na rysunku L.6 pokazano, że ograniczenie (1.1), dotyczące dostępności środka <
S|, nie jest aktywne przy wyznaczaniu części wspólnej. Oznacza to, że dla każdego ( planu dopuszczalnego ograniczenie to będzie spełnione jako nierówność ostra. / .
Jednocześnie każdy punkt czworoboku O ABC jest rozwiązaniem dopuszczalnym zadania programowania produkcji.
1.2.3. Warstwice funkcji celu
Zajmiemy się teraz znalezieniem rozwiązania optymalnego, dla którego wartość funkcji celu jest największa. W dalszych rozważaniach geometrycznych wykorzystamy metodę prób i błędów. Ustalmy pewną wartość zysku, np. wartość 6, i zapytajmy, czy istnieje przynajmniej jedno rozwiązanie dopuszczalne, które pozwoli nam zrealizować ten zysk. Rysując prostą 2jt, + 3x2 = 6 (czyli warstwicę funkcji celu dającą zysk 6), stwierdzamy, że istnieje nieskończenie wiele punktów tej prostej leżących wewnątrz obszaru dopuszczalnego (rys. 1.7). 'Pak więc odpowiedź na pytanie dotyczące istnienia rozwiązania dopuszczalnego dającego wartość 6 jest pozytywna.
Podejmiemy teraz próbę znalezienia lepszych rozwiązań. Wybieramy większą wartość zysku, np. wartość 12, i znajdujemy odpowiadającą jej warstwicę funkcji celu, rysując prostą 2x[ + '$x2=\2. Ponownie stwierdzamy, że istnieją wspólne
Wyszukiwarka
Podobne podstrony:
028 029 2 28 Programowanie liniowe Rysunek 1.7 Rysunek 1.8 punkty tej prostej ze zbiorem rozwiązań d
044 045 2 44 Programowanie liniowe Rysunek 1.12 Nie wszystkie rozpatrywane uprzednio rozwiązania poz
086 087 2 86 Programowanie liniowe Rysunek 1.20 Alternatywnymi bazowymi rozwiązaniami optymalnymi są
088 089 2 88 Programowanie liniowe Rysunek 1.23 Rysunek 1.241.8.2. Wektor wyrazów wolnych zależny od
026 027 26 Piotr Sajpel. Krzysztof Stroiński Zadanie 4 Znaleźć oryginał mając transformatę: i- + 2s
026 027 26 26 *4 XJ «t *1 Sj Si 9ł muf* 1 X X X X MUF*
026 027 26 Piotr Sajpel. Krzysztof Stroiński Zadanie 4 Znaleźć oryginał mając transformatę: .v(a-) =
026 027 26 26 *5 *1 St <h SZUM 1 X X X X MUM I X X X X 6SIIM
1.2. Rozwiązywanie zadań programowania liniowego metodą geometryczną Rysunek 1.1. Klasyfikacja
108 109 2 108 Programowanie liniowe całkowitoliczbowe Rysunek 2.1 Rozpatrzymy najpierw możliwość pod
112 113 Programowanie liniowe całkowitoliczbowe Rysunek 2.6 Rysunek 2.7112 Przykła
skanuj0014 (317) 26 Mathcad. Ćwiczenia Rysunek 2.28. K Calculate F9 Menu rozwijane
Rysunek 2�01 238 l/V ... B. Kinematyka ona określenie położenia punktów należących do ciała w dowoln
Rysunek 2�03 242 l/V ... B. Kinematyka 242 l/V ... B. Kinematyka [47b] s s—vt t2 = 2 a 160 m/min2 [4
Rysunek 2�05 246 l/V ... B. Kinematyka 246 l/V ... B. Kinematyka Przyśpieszenie unoszenia — składowa
Rysunek 2�06 •I i! •I i! 248 l/Y ... B. Kinematyka i i 11 jt ijf lii kątowa co wokół tego punktu, t
więcej podobnych podstron