028 029 2
28 Programowanie liniowe
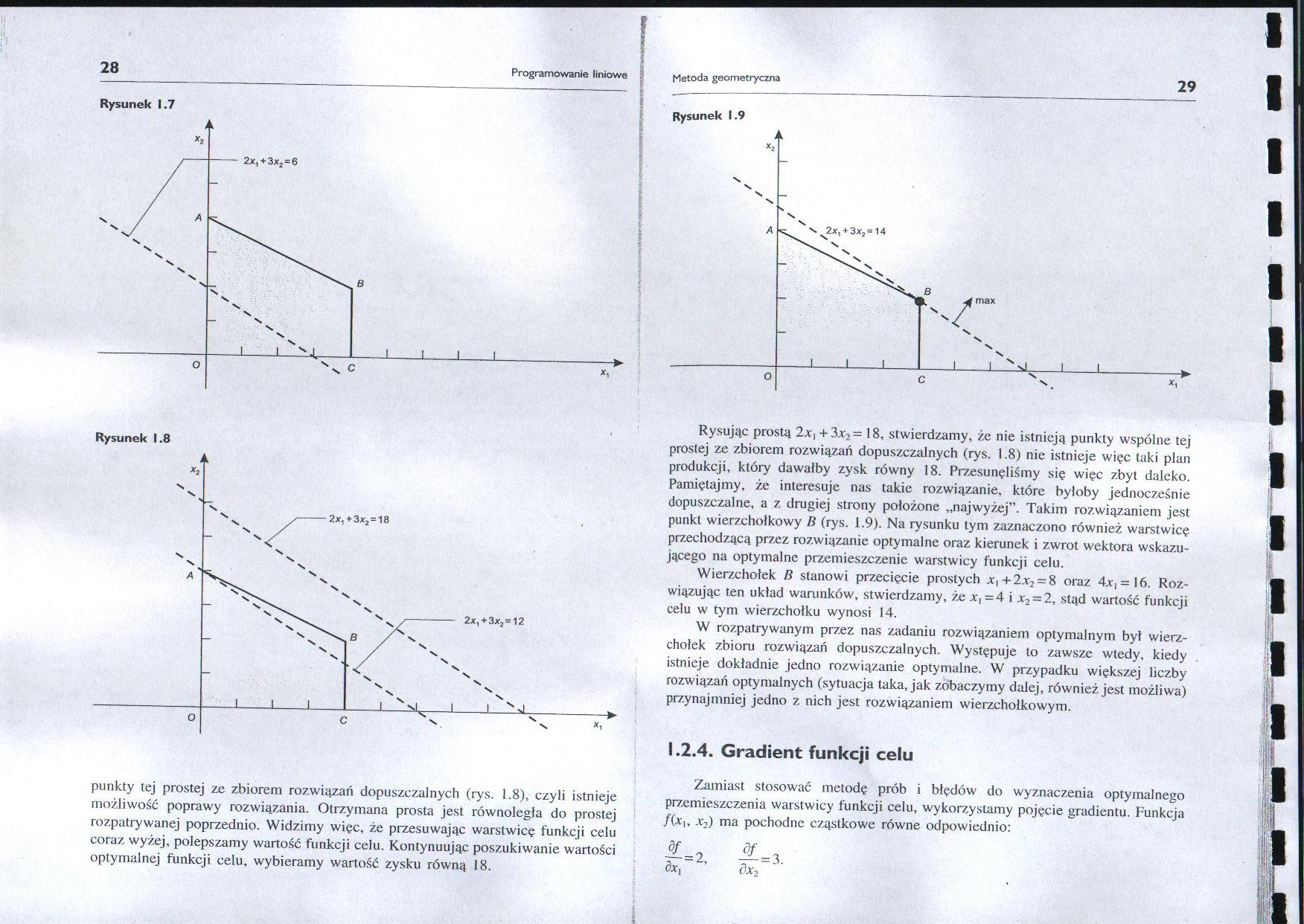
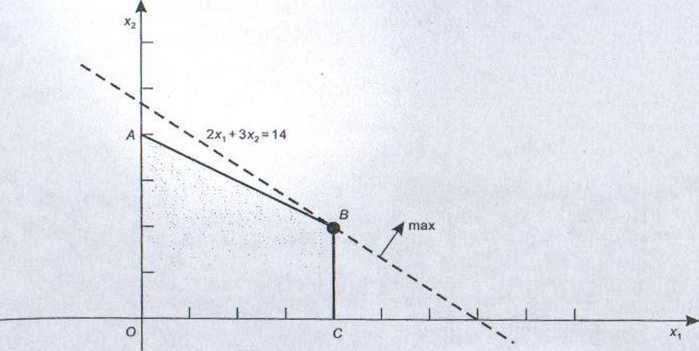
Rysunek 1.7
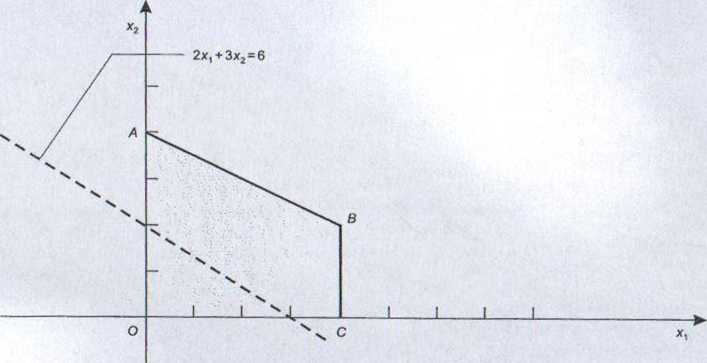
Rysunek 1.8
punkty tej prostej ze zbiorem rozwiązań dopuszczalnych (rys. 1.8), czyli istnieje możliwość poprawy rozwiązania. Otrzymana prosta jest równoległa do prostej rozpatrywanej poprzednio. Widzimy więc, że przesuwając warstwicę funkcji celu coraz wyżej, polepszamy wartość funkcji celu. Kontynuując poszukiwanie wartości optymalnej funkcji celu, wybieramy wartość zysku równą 18.
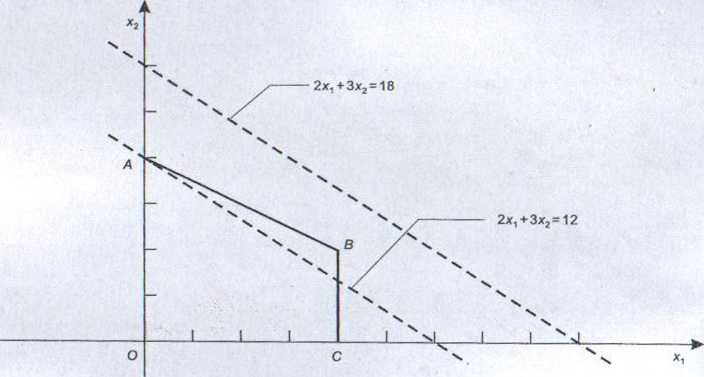
Rysunek 1.9
Rysując prostą 2x, +3x2= 18, stwierdzamy, że nie istnieją punkty wspólne tej prostej ze zbiorem rozwiązań dopuszczalnych (rys. 1.8) nie istnieje więc taki plan produkcji, który dawałby zysk równy 18. Przesunęliśmy się więc zbyt daleko. Pamiętajmy, że interesuje nas takie rozwiązanie, które byłoby jednocześnie dopuszczalne, a z drugiej strony położone „najwyżej”. Takim rozwiązaniem jest punkt wierzchołkowy B (rys. 1.9). Na rysunku tym zaznaczono również warstwicę przechodzącą przez rozwiązanie optymalne oraz kierunek i zwrot wektora wskazującego na optymalne przemieszczenie warstwicy funkcji celu.
Wierzchołek B stanowi przecięcie prostych a, +2.r2 = 8 oraz 4xt = 16. Rozwiązując ten układ warunków, stwierdzamy, ze a, = 4 i x2 = 2, stąd wartość funkcji celu w tym wierzchołku wynosi 14.
W rozpatrywanym przez nas zadaniu rozwiązaniem optymalnym był wierzchołek zbioru rozwiązań dopuszczalnych. Występuje to zawsze wtedy, kiedy istnieje dokładnie jedno rozwiązanie optymalne. W przypadku większej liczby rozwiązań optymalnych (sytuacja taka, jak zobaczymy dalej, również jest możliwa) przynajmniej jedno z nich jest rozwiązaniem wierzchołkowym.
1.2.4. Gradient funkcji celu
Zamiast stosować metodę prób i błędów do wyznaczenia optymalnego przemieszczenia warstwicy funkcji celu, wykorzystamy pojęcie gradientu. Funkcja f(xi, a2) ma pochodne cząstkowe równe odpowiednio:
£-2. f-3.
OT, 8x2
Wyszukiwarka
Podobne podstrony:
044 045 2 44 Programowanie liniowe Rysunek 1.12 Nie wszystkie rozpatrywane uprzednio rozwiązania poz
086 087 2 86 Programowanie liniowe Rysunek 1.20 Alternatywnymi bazowymi rozwiązaniami optymalnymi są
026 027 2 26 Programowanie liniowe Rysunek 1.3 Rysunek 1.4 i «2 /~ 4x, =
088 089 2 88 Programowanie liniowe Rysunek 1.23 Rysunek 1.241.8.2. Wektor wyrazów wolnych zależny od
028 029 28 ., , Zwróćmy uwagę aa prostotę operacji dzielenia w porównaniu z dzieleniem w systemie dz
wyklad2d Z rysunku wynika, że zbiór rozwiązań dopuszczalnych programu PL jest czworokątem o wie
1.2. Rozwiązywanie zadań programowania liniowego metodą geometryczną Rysunek 1.1. Klasyfikacja
108 109 2 108 Programowanie liniowe całkowitoliczbowe Rysunek 2.1 Rozpatrzymy najpierw możliwość pod
112 113 Programowanie liniowe całkowitoliczbowe Rysunek 2.6 Rysunek 2.7112 Przykła
Jakub Cisło Teoria gier 28 czerwca 2013 Rysunek 7: Przykładowy ruch w grze EasyChomp Zadanie 3.
WYKAZ OBSERWACJI POMIERZONYCH tosz Kfoput 28.10.2003r. Rysunek 9 Wykaz obserwacji
Poznaj C++ w$ godziny0072 58 Godzina 5 Rysunek 5.1 W momencie wywołania funkcji program przechodzi d
scan0003 JUofJzoc/o programów PR Rysunek 38. />/y pisemnych i^piwieda dostarczanych mediom nedlti
рис7 Rysunek 26 Koło tendra Rysunek 28 Belka bujakowa Rysunek 27 Zestaw kołowy i maźnica 89
PN-ISO 10816-1:1998 7 pomiarowe na łożyskach w obudowach Rysunek 3 - Punkty pomiarowe dla małych mas
Rysunek 20. Model wczytany do programu COMSOL Rysunek 21 Siatka(mesh) W grzejniku typu fawir przepły
028 029 Rozdział 2MODELOWANIE MATEMATYCZNE UKŁADÓW LINIOWYCH I CZŁONYPODSTAWOWE2.1.
e-mentormetody, formy i programy kształcenia Rysunek 1. Częstotliwość korzystania z internetu przez
więcej podobnych podstron