33932 Rysunek 2�02

I/V ... B. Kinematyka

prędkość średnia punktu na drodze s2 — s i = = As wyniesie
c. Przyspieszenie w ruchu zmiennym po linii prostej
s2 — As
®śr ~ == .
i2 — ti At
[33]
Jeżeli natomiast będziemy rozpatrywać coraz krótsze przedziały czasu At zbliżając się w granicy do zera, to prędkość średnia zbliżać się będzie do pewnej gfanicy, którą nazywamy prędkością punktu w chwili t
As di
v = lim -= — [34]
At-*0 At dż
A zatem prędkość w chwili t jest pochodną drogi względem czasu. Wynika z tego wniosek, że prędkość określona wektorowo w danej chwili jest zawsze styczna do toru i skierowana w kierunku ruchu punktu (rys. 55).
Rys. 55
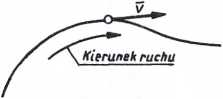
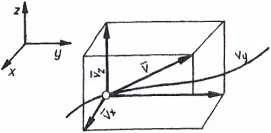
Jeżeli ruch punktu jest określony równaniami parametrycznymi [29], to rzuty prędkości na osie prostokątnego układu współrzędnych są określone przez pochodne odpowiednich współrzędnych względem czasu
vx =
óx
~&t’
Vy
dy
~dt'
vz
d z d t
[35]
a prędkość punktu (rys. 56) v = Vvl+vy t3^]
Prędkość ruchu punktu w płaszczyźnie xy jest określona wzorem
v = ]/ vx+v2y [37]
Rys. 56
Jeżeli torem punktu jest linia prosta, to wektor prędkości tego punktu jest zawsze skierowany wzdłuż tej prostej. Zwrot wektora prędkości jest zgodny z kierunkiem ruchu. Jeżeli w chwili t! punkt miał prędkość vlt zaś w chwili t2 swą prędkość zwiększył do v2 (rys. 57), to średnie przyspieszenie punktu wyniesie
v2 — vi Av t2-ti At

Rys. 57
[38]
m m t2 Kierunek
ruchu
Średnie przyspieszenie jest więc równe przyrostowi prędkości punktu odniesionemu do jednostki czasu.
Jeżeli przedział czasu At będzie się zbliżać w granicy do zera, to przyśpieszenie średnie zbliża się do granicy, którą nazywamy przyśpieszeniem chwilowym punktu w chwili t Av dv
a = lim -=- [39]
At-*o At dt
A zatem przyśpieszenie w chwili t w ruchu punktu po linii prostej jest równe pochodnej prędkości względem czasu.
Jednostką podstawową przyśpieszenia jest 1 m/s2, jednostkami pochodnymi 1 km/h2, 1 m/min2 itp. Podobnie jak prędkość, przyśpieszenie jest wielkością wektorową.
d. Przyspieszenie w ruchu po linii krzywej
Rozpatrzmy dowolny ruch punktu po dowolnej krzywej. Załóżmy, że w chwili ti punkt znajdował się w położeniu
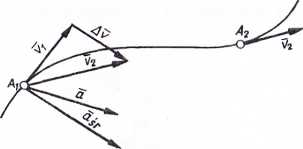
Rys. 58
2. Prędkość i przyspieszenie punktu
241
Ait zaś w chwili t2 w położeniu A% (rys. 58), przy czym t2 — tt = At. Kierunki wektora prędkości punktu zawsze są skierowane zgodnie z kierunkiem stycznej do toru w danym punkcie. Jeżeli do punktu Ax przeniesiemy wektor vi 2 punktu A2t to wektor łączący koniec wektora vi z końcem wektora v2 będzie przedstawiać przyrost wektora prędkości Av między położeniami A± i A2 (w czasie At). Kierunek wektora Av ma również wektor średniego przyśpieszenia dśr» przy czym
Av

Jeżeli At będzie dążyć do zera, to granicę, do której będzie dążyć średnie przyśpieszenie, nazwiemy przyśpieszeniem a w danej chwili t
a = lim (air) = lim —— =- [40]
f_*0 /-*<) At dt
Zależność [40] różni się tym od zależności [39], że występuje tu pochodna wektorowa prędkości względem czasu. Wektor przyśpieszenia a znajduje się w płaszczyźnie promienia krzywizny toru w danym punkcie.
Jeżeli zgodnie z [29] tor punktu można przedstawić w postaci równań parametrycznych ruchu, to miary rzutów przyśpieszenia a na osie współrzędnych wyniosą
d2x d2y d2z
|
a x —— , a y — , d t2 y At1 |
az - . 2 dt2 |
|
[41] | |
|
zaś przyśpieszenie | |
|
a = ]/a2+a2-{-a2 |
[42] |
W przypadku ruchu punktu po dowolnej krzywej płaskiej (w płaszczyźnie xy) wystąpią oczywiście tylko dwie składowe przyśpieszenia ax i ay.
e. Przyśpieszenie styczne i normalne
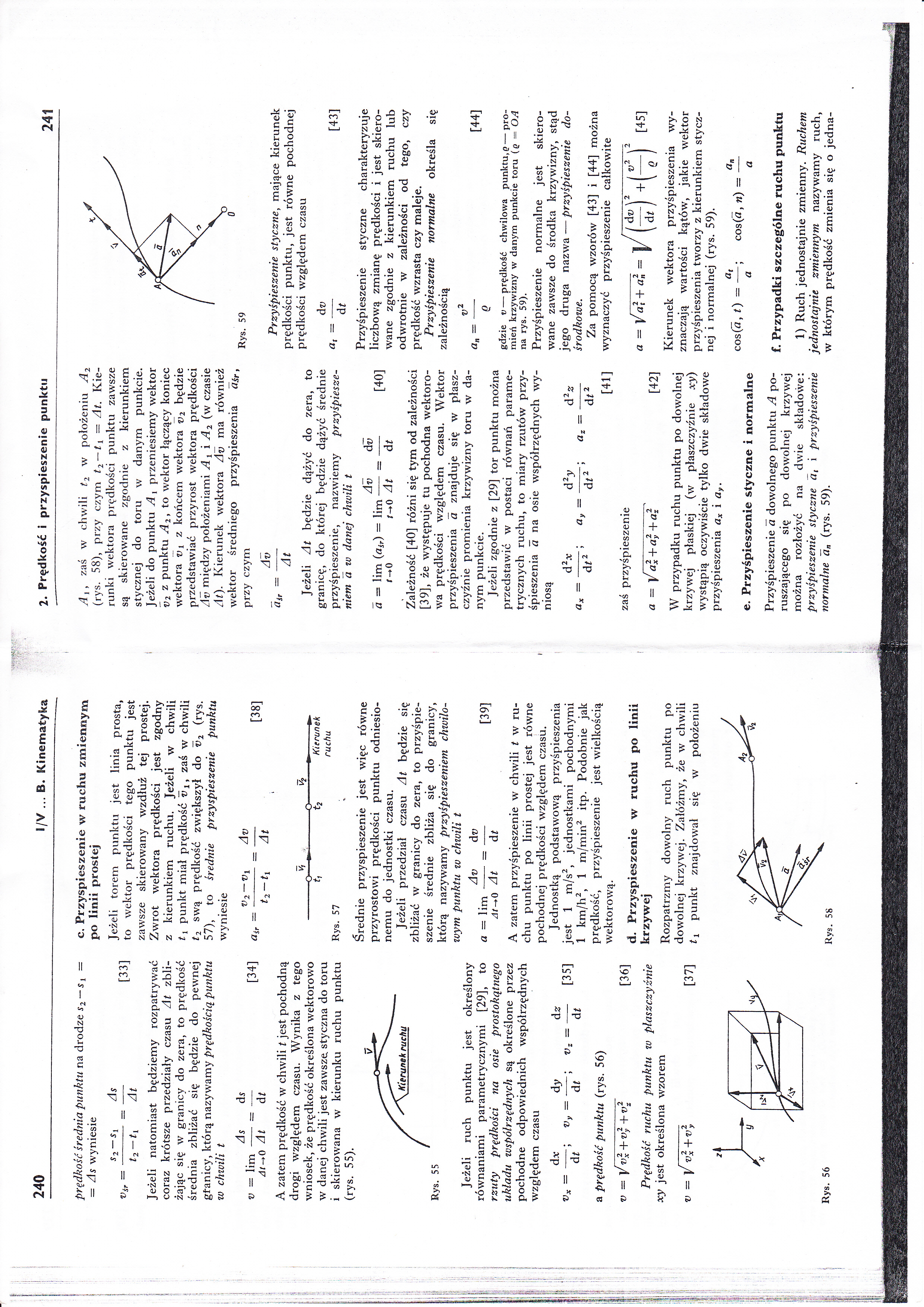
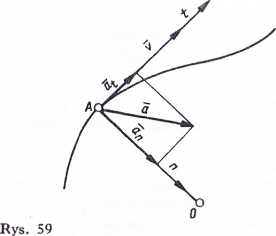
Przyśpieszenie a dowolnego punktu A poruszającego się po dowolnej krzywej można rozłożyć na dwie składowe: przyśpieszenie styczne at i przyśpieszenie normalne an (rys. 59).
Przyśpieszenie styczne, mające kierunek prędkości punktu, jest równe pochodnej prędkości względem czasu
dv
«,=- [43]
Przyśpieszenie styczne charakteryzuje liczbową zmianę prędkości i jest skierowane zgodnie z kierunkiem ruchu lub odwrotnie w zależności od tego, czy prędkość wzrasta czy maleje.
Przyśpieszenie normalne określa się zależnością
v2
<*n = -- [44]
Q
gdzie v — prędkość chwilowa punktu, q — promień krzywizny w danym punkcie toru (e — O A na rys. 59).
Przyśpieszenie normalne jest skierowane zawsze do środka krzywizny, stąd jego druga nazwa — przyśpieszenie dośrodkowe.
Za pomocą wzorów [43] i [44] można wyznaczyć przyśpieszenie całkowite
1451
Kierunek wektora przyśpieszenia wyznaczają wartości kątów, jakie wektor przyśpieszenia tworzy z kierunkiem stycznej i normalnej (rys. 59).
_ at _ a„
cos (a, t) = —; cos(a, n) = — a a
f. Przypadki szczególne ruchu punktu
1) Ruch jednostajnie zmienny. Ruchem jednostajnie zmiennym nazywamy ruch, w którym prędkość zmienia się o jedna-
Wyszukiwarka
Podobne podstrony:
Rysunek 2�01 238 l/V ... B. Kinematyka ona określenie położenia punktów należących do ciała w dowoln
Rysunek 2�03 242 l/V ... B. Kinematyka 242 l/V ... B. Kinematyka [47b] s s—vt t2 = 2 a 160 m/min2 [4
Rysunek 2�05 246 l/V ... B. Kinematyka 246 l/V ... B. Kinematyka Przyśpieszenie unoszenia — składowa
Rysunek 2�06 •I i! •I i! 248 l/Y ... B. Kinematyka i i 11 jt ijf lii kątowa co wokół tego punktu, t
Rysunek 2�06 •I i! •I i! 248 l/Y ... B. Kinematyka i i 11 jt ijf lii kątowa co wokół tego punktu, t
026 027 2 26 Programowanie liniowe Rysunek 1.3 Rysunek 1.4 i «2 /~ 4x, =
44621 Rysunek 2�04 244 l/V ... B. Kinematyka kątową dotyczy również ruchu zmiennego. Przyśpieszenie
więcej podobnych podstron