str005
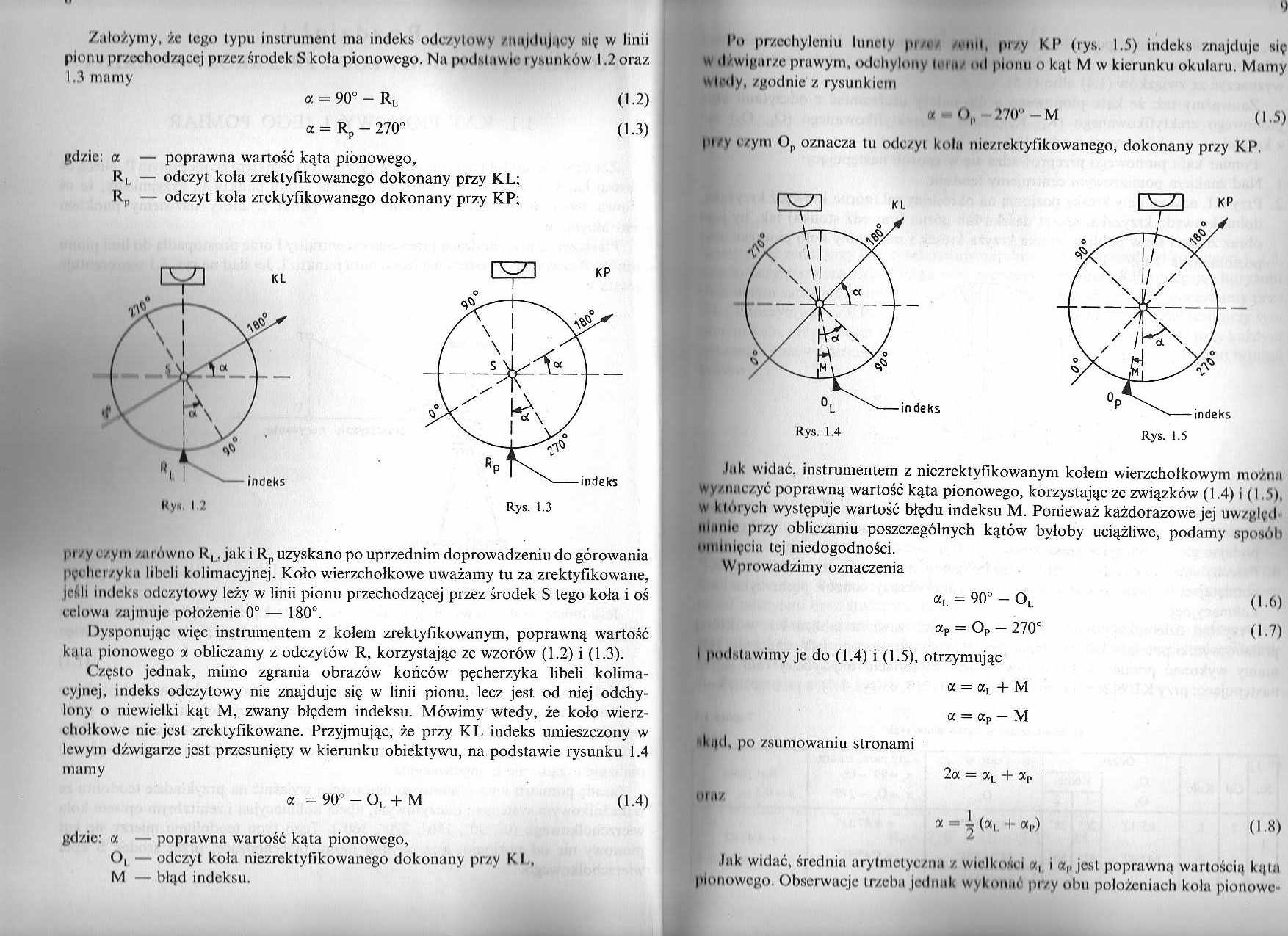
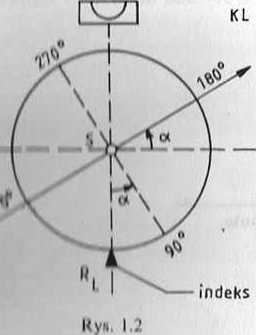
Zulo/ymy, że lego typu instrument ma indeks odczytowy /iiujdu|i|cy się w linii pionu przechodzącej przez środek S koła pionowego. Na podstawie rysunków 1.2 oraz 1.3 mamy
a = 90° — R, (1.2)
a = Rp — 270° (1.3)
gdzie: a — poprawna wartość kąta pionowego,
R, — odczyt koła zrektyfikowanego dokonany przy KL; Rp — odczyt koła zrektyfikowanego dokonany przy KP;
przy czym zarówno R,, jak i Rp uzyskano po uprzednim doprowadzeniu do górowania pv« lici / y k a I i bel i koliinacyjnej. Koło wierzchołkowe uważamy tu za zrektyfikowane, jeśli indeks odczytowy leży w linii pionu przechodzącej przez środek S tego koła i oś celowa zajmuje położenie 0° — 180°.
Dysponując więc instrumentem z kołem zrektyfi kowanym, poprawną wartość kąla pionowego a obliczamy z odczytów R, korzystając ze wzorów (1.2) i (1.3).
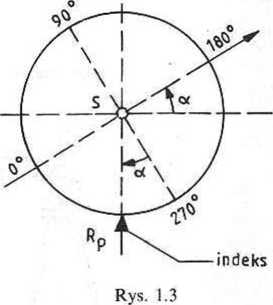
Często jednak, mimo zgrania obrazów końców pęcherzyka libeli kolima-cyjnej, indeks odczytowy nie znajduje się w linii pionu, lecz jest od niej odchylony o niewielki kąt M, zwany błędem indeksu. Mówimy wtedy, że koło wierzchołkowe nie jest zrektyfikowane. Przyjmując, że przy KL indeks umieszczony w lewym dźwigarze jest przesunięty w kierunku obiektywu, na podstawie rysunku 1.4 mamy
a = 90° — Ol + M (1.4)
gdzie: a — poprawna wartość kąta pionowego,
O, — odczyt koła niezreklylikowanego dokonany przy KI .
M — błąd indeksu.
1*0 przechyleniu lunety pto/ muli, przy KI* (rys. 1.5) indeks znajduje się
,, dźwigarze prawym, odchylony u taz ml .......ii o kip M w kierunku okularu. Mamy
*vlł'dy. /godnie z rysunkiem
ot ()„ 270° — M (1.5)
pi v e/.ym Op oznacza tu odczyt kola uiczrektyfikowanego, dokonany przy KP.
|
C^Z) kl |
^71 KP |
|
V / \ |
o 1 1/ A / '\ i// \ 4—¥-4- V4v v |
|
\ / ) o\/ lĄ yo | |
|
°L --indeks |
P -indeks |
|
Rys. 1.4 |
Rys. 1.5 |
|
lak widać, instrumentem z niezrektyfikowanym kołem wierzchołkowym można i\ \ /.nnezyć poprawną wartość kąta pionowego, korzystając ze związków (1.4) i (1.5), a których występuje wartość błędu indeksu M. Ponieważ każdorazowe jej uwzględ | |
ulanie przy obliczaniu poszczególnych kątów byłoby uciążliwe, podamy sposób
.....mięcia lej niedogodności.
Wprowadzimy oznaczenia
ocL = 90° — O, (1.6)
aP = 0P —270° (1.7)
i podstawimy je do (1.4) i (1.5), otrzymując
a = aL + M a = aP — M
iktjd, po zsumowaniu stronami
2a = aL + aP
oni/
a"i(«L + «p) (1.8)
lak widać, średnia arytmetyczna / wielkości /, i ot,, jest poprawną wartością kąltl pionowego. Obserwacje trzeba jednak w \ konni' przy obu położeniach kola pionowe
Wyszukiwarka
Podobne podstrony:
str005 /ułożymy, że lego typu instrument ma indeks odczytowy /iut
Rodzicu! Pamiętaj;Rodzicu • Gdy słyszysz, że Twoje małe dziecko ma problem z płynnym mówieniem, udaj
CAM02230 e znaczenia ezji obrazu wielki ma-ęzyka poc-r obrazach x staje się owują po-iotu
CCF20130109�055 E Wobec — ^0 P zdA = Sy =0,(-0 co oznacza, że oś obojętna przechodzi przez środek ci
Instrukcje • Pętla typu for ma następującą składnię: for (wyrażenie
Scan0008 stosowanie instrukcji montażu ma charakter rutynowy. Może zdarzyć się, że pracownik posiada
Scan0008 stosowanie instrukcji montażu ma charakter rutynowy. Może zdarzyć się, że pracownik posiada
Scan0008 stosowanie instrukcji montażu ma charakter rutynowy. Może zdarzyć się, że pracownik posiada
CCF20090514�017 138I. Indukcja i wyjaśnianie sobów analizowania lego typu przyczynowości opiera się
grupa 2 endo 1 prawdziwe A. I). <;2. w diagnostyce cukrzy typu , nic ma,, ,nnczen,„ nlstępuj„., p
skanuj0007 (217) CUDOWNA KURACJA NA MALARIĘ I INNE CHOROBY dokończenie ze strony 28 Nie ma usprawied
skanuj0059 (24) 62 MIKOŁAJ MADUROWICZWprowadzenie □ Wyobraźmy sobie, że na świecie nie ma turystów..
więcej podobnych podstron