Laboratorium automatyki i sterowania
Ćwiczenie 6:
Synteza sekwencyjnych układów przełączających
Data wykonania: 1995-04-10
Wykonali: Krzysztof Janowski
Robert Gałat
Adam Ligencki
Synteza układów sekwencyjnych na podstawie tablicy kolejności łączeń metodą uproszczoną
Metoda uproszczona polega na dokładnym anlizowaniu tablicy kolejności łączeń i na tej podstawie na bezpośrednim zapisie minimalnych postaci funkcji logicznych. Oczywiście, tablicę kolejności łączeń należy zawsze doprowadzić do postaci rozwiązywalnej. Metoda ta jest specjalnie dogodna w przypadku dużej liczby elementów w automacie i niezbyt złożonej tablicy kolejności łaczeń (przypadek najczęściej spotykany w praktyce).
Za podstawę określania warunków pracy poszczególnych elementów przyjmuje się cykl pracy automatu, tj. taką liczbę taktów rozwiązywalnej tablicy kolejności łączeń, po których stany automatu powtarzają się.
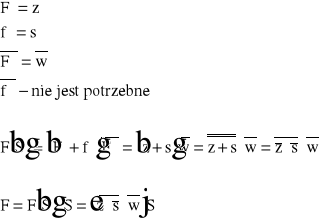
W czasie cyklu działania dowolnego elementu X powinny istnieć warunki jego działania oraz nie powinny istnieć warunki jego niedziałania. W ogólnym przypadku można cykl ten opisać wzorem:
![]()
,
gdzie:
F(X) - funkcja opisująca działanie elementu X ,
F - funkcja przedstawiająca przyczynę załączenia elementu X, która pojawia się w takcie poprzedzającym cykl działania i znika w jednym z taktów tego cyklu,
f - funkcja dodatkowa podtrzymująca działanie elementu X we wszystkich taktach jego załączenia,
![]()
- funkcja przedstawiająca negację warunków niedziałania elementu X i znikająca w ostatnim takcie jego załączenia (w ogólnym przypadku funkcja ta może znikać w części taktów cyklu działania elementu X),
![]()
- funkcja dodatkowa zapewniająca istnienie negacji warunków niedziałania elementu X we wszystkich taktach jego załączenia.
Zadanie 1
Zaprojektować układ załączania silnika asynchronicznego S do sieci za pomocą stycznika. Załączanie przyciskiem Z, wyłączanie przyciskiem W.
Wprowadźmy oznaczenia:
z - zmienna opisująca stan przycisku Z (z=1 dla wciśniętego, z=0 dla zwolnionego),
w - zmienna opisująca stan przycisku W (w=1 dla wciśniętego, w=0 dla zwolnionego),
S - zmienna opisująca stan silnika (S=1 dla załączonego, S=0 dla wyłączonego) w bieżacym takcie,
s - zmienna opisująca stan silnika w poprzednim takcie.
Tablica kolejności łączeń
Takt |
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
itd. |
z |
1 |
- |
+ |
|
- |
|
|
|
|
|
|
+ |
|
- |
|
w |
2 |
- |
|
|
|
|
|
+ |
|
- |
|
|
|
|
|
S |
4 |
- |
|
+ |
|
|
|
|
- |
|
|
|
+ |
|
|
Stan ukł. |
|
0 |
1 |
5 |
4 |
4 |
4 |
6 |
2 |
1 |
1 |
1 |
5 |
4 |
|
W tablicy występują powtórzenia stanów układu, ale wszystkie powtórzenia stanów należą do cykli jednego rodzaju, tzn. działania (takty: 3,4,5) badź niedziałania (takty: 8,9,10) silnika. Tablica jest zatem rozwiązywalna.
Funkcję F opisującą działanie obiektu znajdziemy korzystając z metody uproszczonej.
Schemat łączeniowy układu
WNIOSEK:
Przedstawiony wyżej układ został przetestowany w czasie zajęć laboratoryjnych i stwierdzono, że działa on poprawnie.
Zadanie 3
Zaprojektować układ stabilizacji poziomu cieczy. Jego praca powinna przebiegać zgodnie z podanym wykresem czasowym.
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
Wprowadźmy oznaczenia:
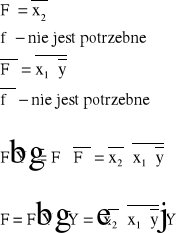
x1 - zmienna opisująca stan dolnego czujnika (x1=1 dla zanurzonego, x1=0 dla wynurzonego),
x2 - zmienna opisująca stan górnego czujnika (x2=1 dla zanurzonego, x2=0 dla wynurzonego),
Y - zmienna opisująca stan pompy (Y=1 dla załączonej, Y=0 dla wyłączonej),
y - zmienna opisująca stan pompy w poprzednim takcie.
Tablica kolejności łączeń
Takt |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
itd. |
x1 |
1 |
|
|
|
- |
+ |
|
|
|
|
x2 |
2 |
+ |
|
- |
|
|
+ |
|
- |
|
Y |
4 |
- |
|
|
+ |
|
- |
|
|
|
Stan ukł. |
|
3 |
3 |
1 |
4 |
5 |
3 |
3 |
1 |
|
W tablicy występują powtórzenia stanów układu, ale wszystkie należą do cykli niedziałania pompy (takty: 1,2). Tablica jest zatem rozwiązywalna.
Funkcję F opisującą działanie obiektu znajdziemy korzystając z metody uproszczonej.
Schemat łączeniowy układu
WNIOSEK:
Przedstawiony wyżej układ został przetestowany w czasie zajęć laboratoryjnych i stwierdzono, że działa on poprawnie.
Zadanie 2
Przeprowadzić syntezę układu zdalnego załączania silnika przenośnika taśmowego S z następującymi warunkami pracy:
nacisnięcie przycisku startowego Z powinno uruchomić sygnał akustyczny G, który powinien rozlegać się tak długo, jak długo przycisk Z będzie wciśnięty;
w momencie zwolnienia przycisku Z stycznik powinien załączyć silnik S;
wyłączenie układu powinno być dokonywane przyciskiem W.
Wprowadźmy oznaczenia:
z - zmienna opisująca stan przycisku Z (z=1 dla wciśniętego, z=0 dla zwolnionego),
w - zmienna opisująca stan przycisku W (w=1 dla wciśniętego, w=0 dla zwolnionego),
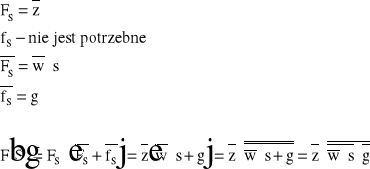
S - zmienna opisująca stan silnika (S=1 dla załączonego, S=0 dla wyłączonego) w bieżacym takcie,
s - zmienna opisująca stan silnika w poprzednim takcie,
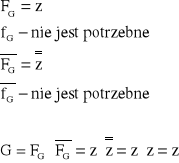
G - zmienna opisująca stan sygnału akustycznego (G=1 dla włączonego, G=0 dla wyłączonego) w bieżacym takcie,
g - zmienna opisująca stan sygnału akustycznego w poprzednim takcie.
Tablica kolejności łączeń
Takt |
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
itd. |
z |
1 |
- |
+ |
|
- |
|
|
|
|
|
|
|
|
+ |
|
- |
|
w |
2 |
- |
|
|
|
|
|
|
|
+ |
|
- |
|
|
|
|
|
G |
4 |
- |
|
+ |
|
- |
|
|
|
|
|
|
|
|
+ |
|
|
S |
8 |
- |
|
|
|
+ |
|
|
|
|
- |
|
|
|
|
|
|
Stan ukł. |
|
0 |
1 |
5 |
4 |
8 |
8 |
8 |
8 |
10 |
2 |
0 |
0 |
1 |
5 |
4 |
|
W tablicy występują powtórzenia stanów układu, ale wszystkie należą do cykli działania silnika i niedziałania sygnału akustycznego (takty: 4,5,6,7) bądź cykli niedziałania silnika i głośnika (takty: 10,11). Tablica jest zatem rozwiązywalna.
Funkcję F opisującą działanie obiektu znajdziemy korzystając z metody uproszczonej.
![]()
Schemat łączeniowy układu
WNIOSEK:
Funkcja opisująca działanie układu została wyznaczona prawidłowo. Funkcję tę wyznaczono metodą uproszczoną i metodą numerycznego zapisu funkcji logicznych uzyskując w obu przypadkach identyczny wynik.
W spawozdaniu zamieszczano jedynie obliczenia przeprowadzone metodą uproszczoną.
Na podstawie uzyskanego równania można uzyskać układ o strukturze przedstawionej wyżej. W czasie zajęć laboratoryjnych zrealizowano praktycznie ten układ, ale nie działał on prawidłowo. Przyczyną było najprawdopodobniej niedopasowanie dynamicznych parametrów bramek (bramka ![]()
miała zbyt krótki czas przełączania).
Wyszukiwarka
Podobne podstrony:
JAUT6~1, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, AUTOMATYKA LABORATORIUM, AUT
Automatyka i sterowanie, Pomiary w energetyce
automatyka i sterowanie wyklad 15
automatyka i sterowanie wyklad Nieznany (8)
Automatyka i sterowanie, zakres stosowania i podział
automatyka i sterowanie wyklad Nieznany (2)
badanie silnika krokowego, mechanika, BIEM- POMOCE, automatyka i sterowanie
automatyka i sterowanie wyklad 3
Automatyka i sterowanie, autom sprawozdanie, Wydział: Budowa Maszyn i Informatyki
Automatyka i sterowanie, autom sprawozdanie, Wydział: Budowa Maszyn i Informatyki
Automatyka i sterowanie Elementy urządzeń AKP
wyniki 03-02-14 automatyka i sterowanie
automatyka i sterowanie wyklad Nieznany (7)
01 Wprowadzenie do układów automatycznego sterowania
automatyczny sterownik oswietle Nieznany (2)
Automatyka i sterowanie Instalowanie układów pomiarowych
automatyka i sterowanie wyklad Nieznany (14)
Automatyka i sterowanie, Pneumatyczne przyrządy pomiarowe, Akademia Techniczno - Humanistyczna w Bie
układy kombinacyjne, mechanika, BIEM- POMOCE, automatyka i sterowanie
więcej podobnych podstron