090 091
przerzuoników synchronicznych U-S 1 wyzwalanych zboczem oraz łatwość projektowania, znacznie zwiększyło atrakcyjność układów synchronicznych kosztem asynchronicznych w typowych pracach konstrukcyjnych. Metody konstrukcji układów asynchronicznych mają głównie znaczenie jako metody „pierwotne" umożliwiające konstrukcje przerzutników synchronicznych, na bazie których rozwinęły się „wtórne" metody konstrukcji układów synchronicznych.
Wyczerpująco a zarazem dostępnie omówiono syntezę układów asynchronicznych w podręcznikach [16,17,28].
A ' ’ ■
3>1. Tworzenie grafu układu asynchronicznego
Przy tworzeniu grafu układu asynchronicznego należy sobie zdawać sprawę, że układ ten nie jest synchronizowany impulsami zegarowymi i w związku z tym podanie określonego sygnału wejściowego spowoduje, że w czasie jego trwania układ będzie, z szybkością wynikającą z Jego wewnętrznych czasów propagacji, tak długo zmieniał stan zgodnie z grafem, dopóki nie natrafi na stan podtrzymywany przez ten sygnał wejściowy. W zastosowaniach praktycznych najczęściej znaczenie mają tylko te stany, w których układ pozostaje do czasu zmiany sygnału wejściowego. Przejście przez kilka stanów przed zatrzymaniem się w danym stanie jest dopuszczalne, o ile nie przeszkadzają nam stany przejściowe sygnału wyjściowego, ale wydłuża czas reakcji układu oraz może utrudnić kodowanie zapewniające poprawną pracę układu.
Jeżeli przy konstrukcji grafu układu asynchronicznego chcemy, aby każdy nowy sygnał wejściowy powodował tylko jedną zmianę stanu, to każde przejście pod wpływem danego sygnału wejściowego powinno prowadzić do stanu podtrzymywanego przez ten sygnał.
Stan podtrzymywany przez dany sygnał wejściowy nazywamy stanem stabilnym przy danym sygnale wejściowym, czyli stan £ jest stabilny przy wejściu x, jeżeli
cS (q, 2) = q
gdzie <3 jest funkcją przejścia z równać (1.1) lub (1.2).
Prz-ykład 3.11
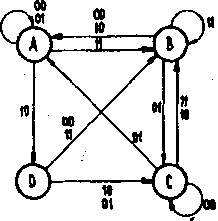
Ha rys. 3.31 przedstawiono graf oraz tablicę przejść układu sekwencyjnego. Omówimy działanie tego układu zakładając, że został on zrealizowany Jako asynchroniczny.
Z rysunku widać, że stany A, B, C są stabilnymi przy odpowiednich sygnałach wejściowych, natomiast stan D nie jest stanem stabilnym przy żad-' nym sygnale wejściowym, tzn., że układ nigdy nie pozostaje w nim dłużej niż przez czas związany z przejściem do następnego stanu. Widać ponadto, że sygnał 10 powoduje cykliczne przebieganie wszystkich stanów, Pod wpływem sygnału wejściowego 01 układ przechodzi ze stanu B w niestabilny przy tym sygnale stan C, aby ostatecznie zatrzymać się w stanie A. #
|
\ |
to |
01 |
« |
« |
|
A |
% |
W, |
a |
0 |
|
1 |
k |
t |
i |
k |
|
t |
i |
k |
i |
l |
|
> |
i |
t |
i |
c |
Rys. 3.31. Graf i tablica przejść układu asynchronicznego z przykładu 3-11 • Stany stabilne przy danych wejściach zostały zakreskowane
Jednoczesna zmiana więcej niż jednej składowej sygnału wejściowego jest mało prawdopodobna, bowiem jeżeli nawet wystąpi, to różne opóźnienia na drodze poszczególnych sygnałów wewnątrz układu mogą spowodować ich nie-jednoczesne oddziaływanie. Zwykle z tego powodu, przy formułowaniu opisu słownego układu asynchronicznego żąda się tylko, aby przy jednoczesnej zmianie kilku składowych sygnału wejściowego układ przeszedł do jednego ze stanów, do którego by doszedł, gdyby zmiana ta była rozdzielona na kolejne zmiany tylko pojedynczych składowych.
Z rys. 3*31 widać, że np. gdy układ znajduje się w stanie A przy sygnale 00 i sygnał zmieni się na 11, to układ przejdzie ostatecznie do stanu B niezależnie czy nastąpiła jednoczesna zmiana 00 na 11, czy też nastąpiła sekwencja 00,10,11 lub 00, 01, 11.
Zwykle przy konstrukcji grafu układu asynchronicznego zakłada się początkowo przejście nieokreślone pod wpływem jednoczesnej zmiany więcej niż jednej składowej sygnału wejściowego a następnie, po minimalizacji grafu, sprawdzamy, czy nieokreślone przejścia, które zmieniły się na określone, spełniają wyżej wymieniony warunek dojścia do tego samego stanu Co przy rozdzieleniu zmiany sygnału wejściowego na kolejne składowe.
Reasumując, przy konstrukcji grafu układu asynchronicznego postępujemy jak przy konstrukcji grafu układu synchronicznego uwzględniając zjawiska zasygnalizowane powyższymi uwagami.
Obecnie przedstawimy kilka przykładów tworzenia grafów układów asynchronicznych.
Przykład 3.12
Skonstruować graf układu asynchronicznego o jednym wyjściu, na którym sygnał zmienia się na przeciwny po każdym sygnale „1" na wejściu (dwójka licząca).
Na rys. 3.52 przedstawiono zadany wykres czasowy działania układu oraz wynikający z niego graf i tablicę przejść/wyjść. Kolejnym różnym parom wejścia-wyjście przypisano różne stany. #
Wyszukiwarka
Podobne podstrony:
090 091 przerzuouików synchronicznych U-S 1 wyzwalanych zboczem oraz łatwość projektowania, znacznie
Zadanie 3. Wykorzystując model układu synchronicznego przerzutnika JK wyzwalanego zboczem opadającym
ark21 Przerzutniki typu O? (a) wyzwalany zboczem narastającym; (b) wyzwalany zboczem
Page18 Wykres czasowy dla przerzutnika typu D Przerzutmkj typu 3? (a) wyzwalany zboczem narastającym
Rys. 10.19. Przerzutnik D wyzwalany zboczem jako dzielnik
Image442 Oczywiście ten układ, tak jak poprzedni, można przekształcić na układ wyzwalany zboczem dod
Bloki IOB 3 rejestry skonfigurowane sa jako wyzwalane zboczem flip-flop’y typu D lub latch’e aktywne
str 090 091 tSm I fOm I 3-Sm .podane są przekroje (nr 1 i 2) w podziałee: 1 : 100
090 091 2 90 Programowanie liniowe Przyjmujemy dowolną wartość początkową parametru. Ponownie najbar
090 091 2 INDEX Abutilon 9 Flowering mapie Acacia 9 Mimosa Aralvoha 9 Chenille
090 091 3. rairz jak wyżej pkt. 3 w metodzie addytywnęj. 4. Skor
090 091 555 1°cwc20c« --
090 091 Convolvulus_ Corbeille d argent Corbeilled or_ Cordyline _ Corćopsis _ Coreopsis _ Corćte
090 091 nudiui mi przepisów i w podejmowaniu na Ich podstawie decyzji, której nie przekreślają Środk
090 2 M Kaprawa samochodów Syrena wego czopa oraz uwzględnić poprzednio omówione odchyłki w następuj
str 090 091 w lasach lipnickich kolo Białej Podlaskiej. Tu zostali zorganizowani w oddziały bojowe.
str 090 091 instrukcje od generała, przecież był jego zwierzchnikiem. „Takich mamy przywódców lansow
więcej podobnych podstron